深入浅出计算机组成原理
极客时间 徐文浩
入门篇
知识图谱:
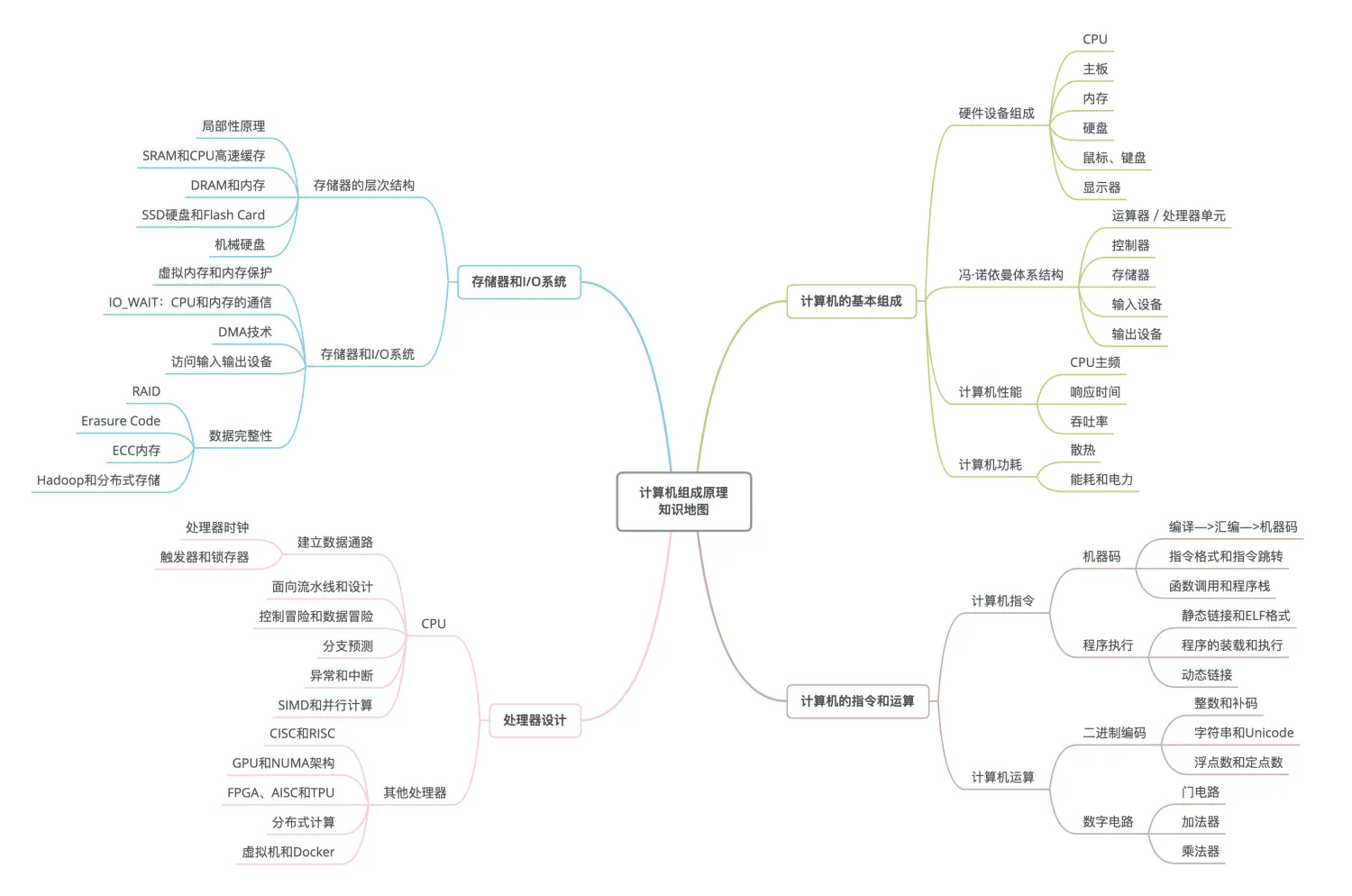
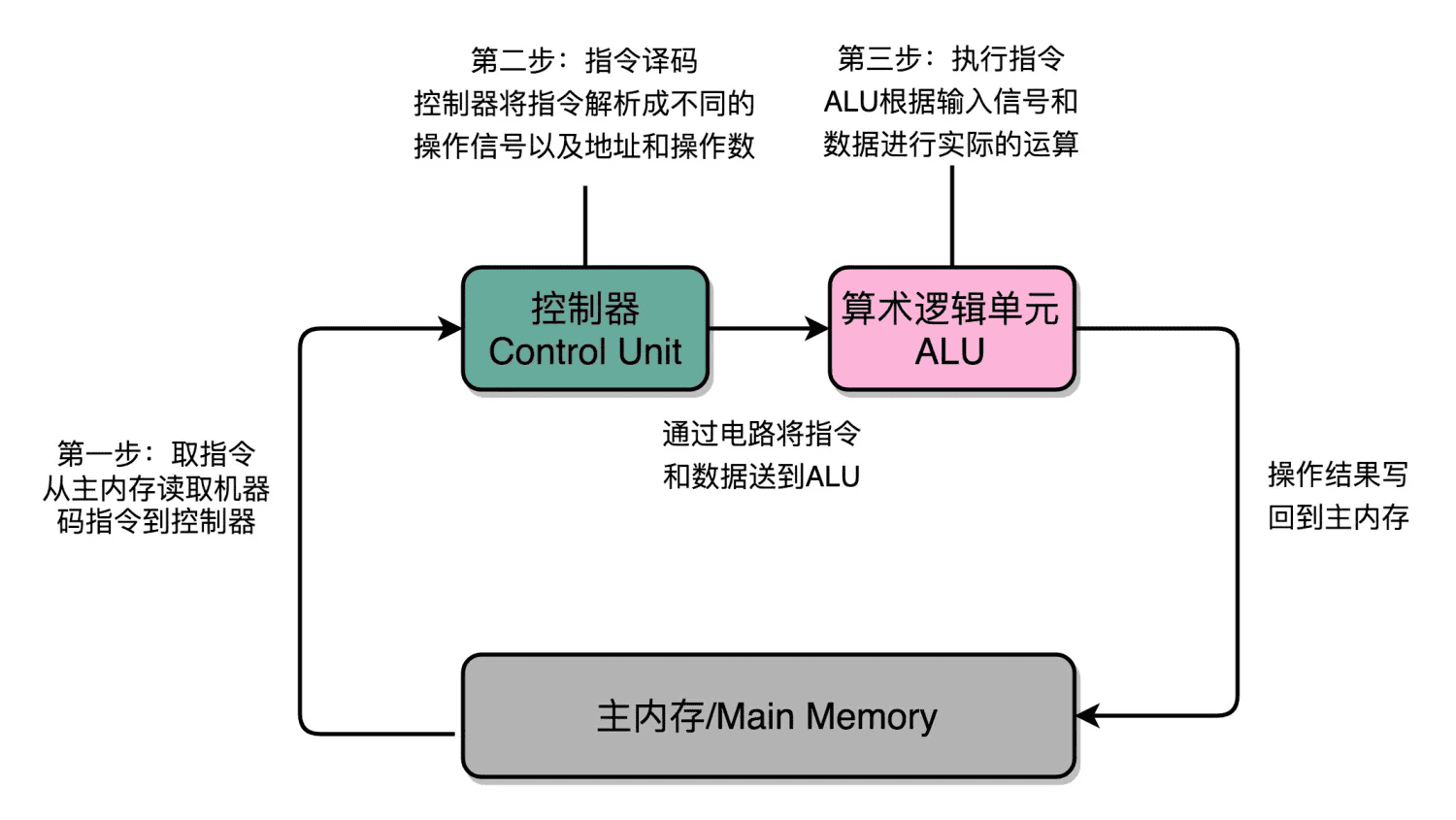
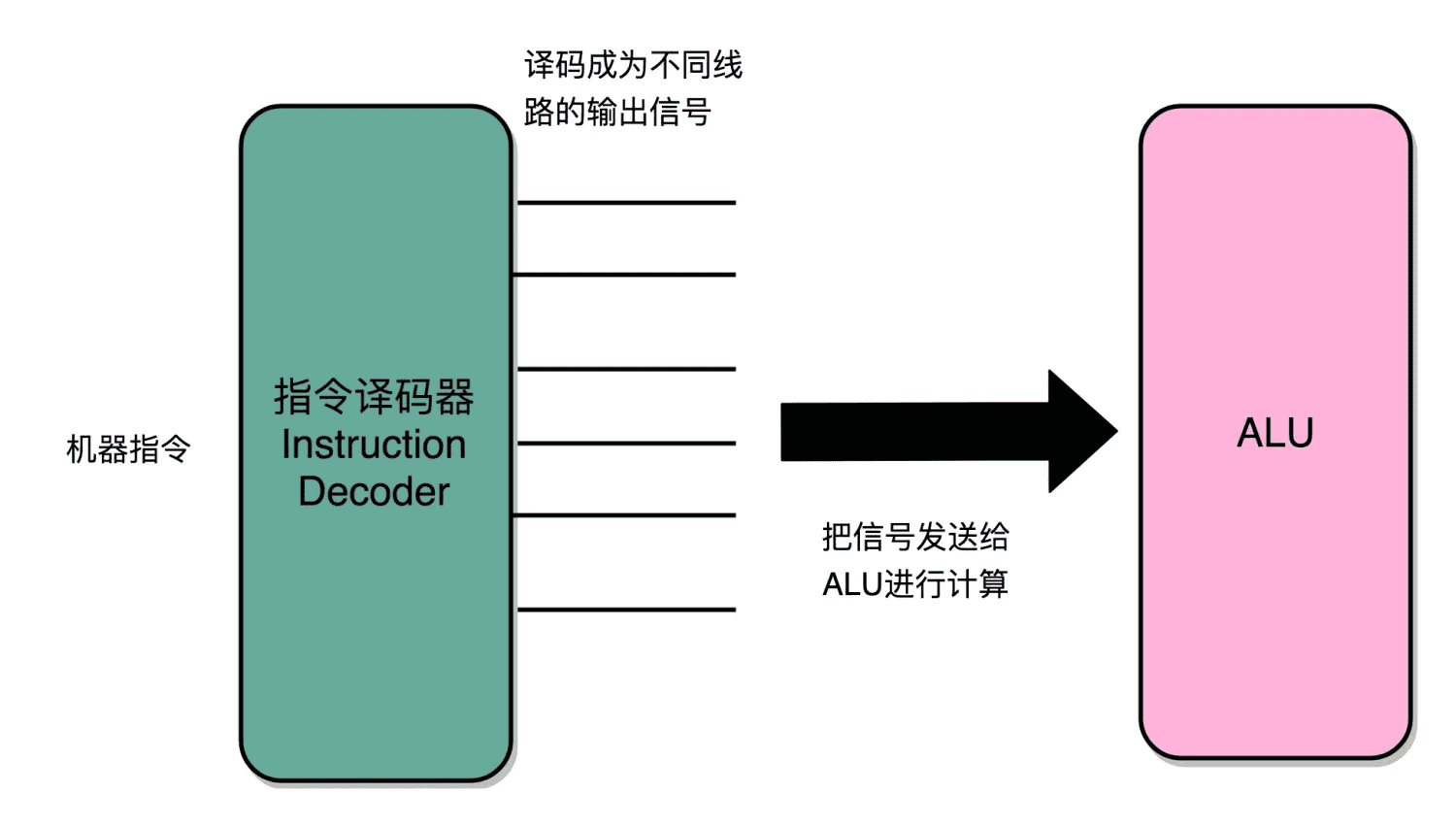
我们的程序是怎么通过编译器和汇编器,变成一条条机器指令这样的编译过程,我们的操作系统是怎么链接、装载、执行这些程序的。而这一条条指令执行的控制过程,就是由计算机五大组件之一的控制器来控制的。
相较于整个计算机科学中的其他科目,计算机组成原理更像是整个计算机学科里的“纲要”。这门课里任何一个知识点深入挖下去,都可以变成计算机科学里的一门核心课程。比如说,程序怎样从高级代码变成指令在计算机里面运行,对应着“编译原理”和“操作系统”这两门课程;计算实现背后则是“数字电路”;如果要深入 CPU 和存储器系统的优化,必然要深入了解“计算机体系结构”。
推荐书籍:
每个程序员都应该了解的内存知识(What every programmer should know about memory):
知乎翻译:https://zhuanlan.zhihu.com/p/611133924
里面也有官方原文链接。
Disruptor 中文参考
开源主页:https://github.com/LMAX-Exchange/disruptor
cpu性能:
程序的 CPU 执行时间 = 指令数×CPI×Clock Cycle Time
这么来看,如果要提升计算机的性能,我们可以从指令数、CPI 以及 CPU 主频这三个地方入手。要搞定指令数或者 CPI,乍一看都不太容易。于是,研发 CPU 的硬件工程师们,从 80 年代开始,就挑上了 CPU 这个“软柿子”。在 CPU 上多放一点晶体管,不断提升 CPU 的时钟频率,这样就能让 CPU 变得更快,程序的执行时间就会缩短。
相较于 1978 年到 2000 年,这 20 年里 300 倍的主频提升,从 2000 年到现在的这 19 年,CPU 的主频大概提高了 3 倍。
我们在进行性能优化中,常常用到的一个经验定律,阿姆达尔定律(Amdahl’s Law)。这个定律说的就是,对于一个程序进行优化之后,处理器并行运算之后效率提升的情况。具体可以用这样一个公式来表示: 优化后的执行时间 = 受优化影响的执行时间 / 加速倍数 + 不受影响的执行时间
无论是简单地通过提升主频,还是增加更多的 CPU 核心数量,通过并行来提升性能,都会遇到相应的瓶颈。仅仅简单地通过“堆硬件”的方式,在今天已经不能很好地满足我们对于程序性能的期望了。于是,工程师们需要从其他方面开始下功夫了。
在“摩尔定律”和“并行计算”之外,在整个计算机组成层面,还有这样几个原则性的性能提升方法。
1.加速大概率事件。最典型的就是,过去几年流行的深度学习,整个计算过程中,99% 都是向量和矩阵计算,于是,工程师们通过用 GPU 替代 CPU,大幅度提升了深度学习的模型训练过程。本来一个 CPU 需要跑几小时甚至几天的程序,GPU 只需要几分钟就好了。Google 更是不满足于 GPU 的性能,进一步地推出了 TPU。后面的文章,我也会为你讲解 GPU 和 TPU 的基本构造和原理。
2.通过流水线提高性能。现代的工厂里的生产线叫“流水线”。我们可以把装配 iPhone 这样的任务拆分成一个个细分的任务,让每个人都只需要处理一道工序,最大化整个工厂的生产效率。类似的,我们的 CPU 其实就是一个“运算工厂”。我们把 CPU 指令执行的过程进行拆分,细化运行,也是现代 CPU 在主频没有办法提升那么多的情况下,性能仍然可以得到提升的重要原因之一。我们在后面也会讲到,现代 CPU 里是如何通过流水线来提升性能的,以及反面的,过长的流水线会带来什么新的功耗和效率上的负面影响。
3.通过预测提高性能。通过预先猜测下一步该干什么,而不是等上一步运行的结果,提前进行运算,也是让程序跑得更快一点的办法。典型的例子就是在一个循环访问数组的时候,凭经验,你也会猜到下一步我们会访问数组的下一项。后面要讲的“分支和冒险”、“局部性原理”这些 CPU 和存储系统设计方法,其实都是在利用我们对于未来的“预测”,提前进行相应的操作,来提升我们的程序性能。
原理篇:指令和运算
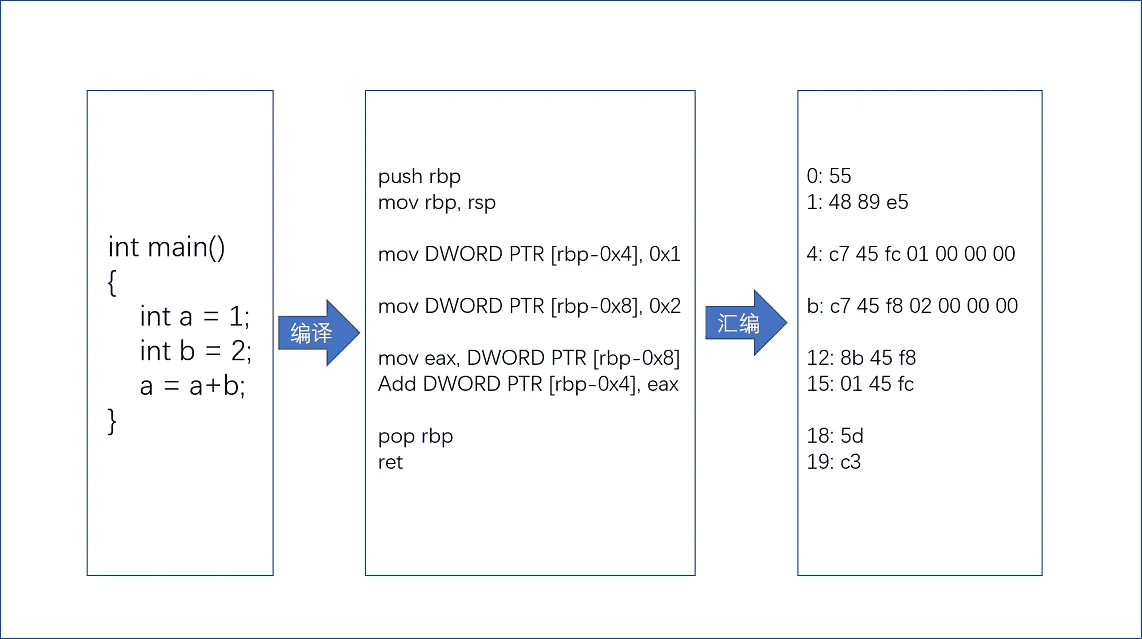
从高级语言到汇编代码,再到机器码,就是一个日常开发程序,最终变成了 CPU 可以执行的计算机指令的过程。
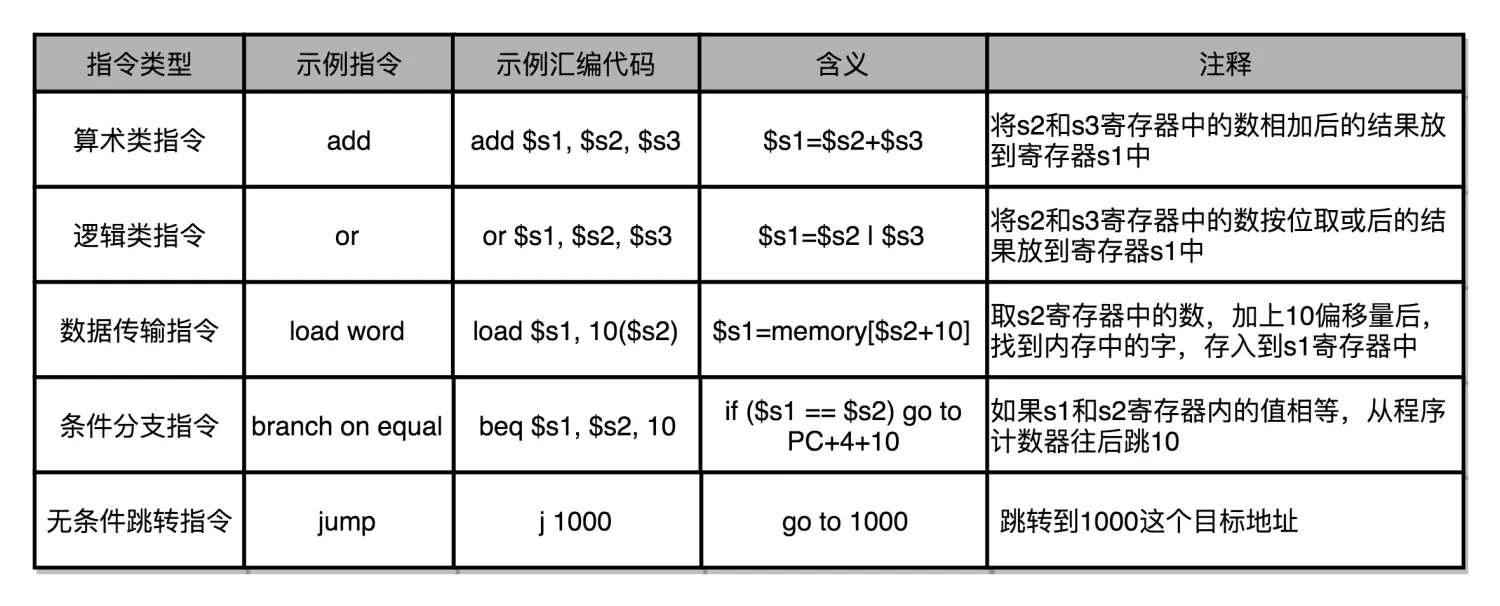
常见的指令可以分成五大类。
第一类是算术类指令。我们的加减乘除,在 CPU 层面,都会变成一条条算术类指令。
第二类是数据传输类指令。给变量赋值、在内存里读写数据,用的都是数据传输类指令。
第三类是逻辑类指令。逻辑上的与或非,都是这一类指令。
第四类是条件分支类指令。日常我们写的“if/else”,其实都是条件分支类指令。 最后一类是无条件跳转指令。写一些大一点的程序,我们常常需要写一些函数或者方法。在调用函数的时候,其实就是发起了一个无条件跳转指令。
不同的 CPU 有不同的指令集,也就对应着不同的汇编语言和不同的机器码。
“汇编语言”其实可以理解成“机器码”的一种别名或者书写方式,不同的指令集和体系结构的机器会有不同的“机器码”。高级语言在转换成为机器码的时候,是通过编译器进行的,需要编译器指定编译成哪种汇编/机器码。物理机自己执行的时候只有机器码,并不认识汇编代码。
为了方便你快速理解这个机器码的计算方式,我们选用最简单的 MIPS 指令集,来看看机器码是如何生成的。MIPS 是一组由 MIPS 技术公司在 80 年代中期设计出来的 CPU 指令集。就在最近,MIPS 公司把整个指令集和芯片架构都完全开源了。
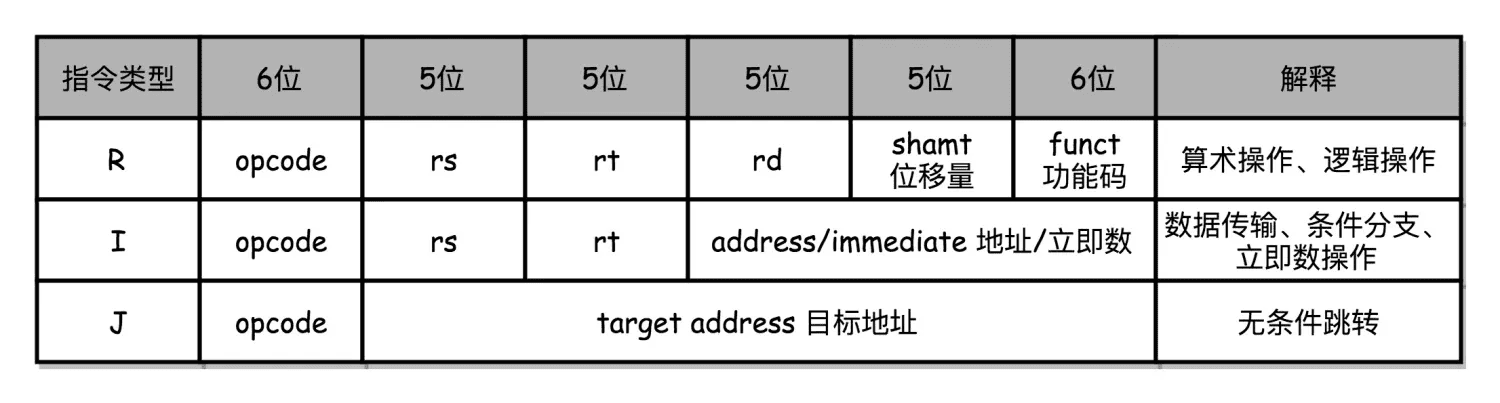
MIPS 的指令是一个 32 位的整数,高 6 位叫操作码(Opcode),也就是代表这条指令具体是一条什么样的指令,剩下的 26 位有三种格式,分别是 R、I 和 J。
R 指令是一般用来做算术和逻辑操作,里面有读取和写入数据的寄存器的地址。如果是逻辑位移操作,后面还有位移操作的位移量,而最后的功能码,则是在前面的操作码不够的时候,扩展操作码表示对应的具体指令的。
I 指令,则通常是用在数据传输、条件分支,以及在运算的时候使用的并非变量还是常数的时候。这个时候,没有了位移量和操作码,也没有了第三个寄存器,而是把这三部分直接合并成了一个地址值或者一个常数。
J 指令就是一个跳转指令,高 6 位之外的 26 位都是一个跳转后的地址。
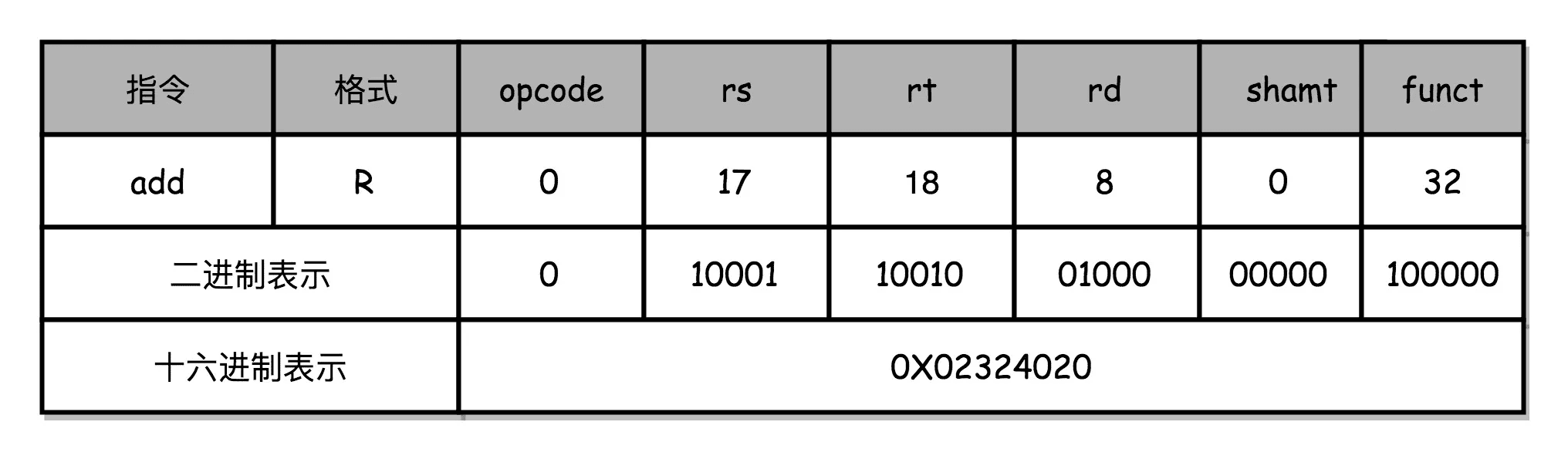
我以一个简单的加法算术指令 add $t0,$s2,$s1 为例,给你解释。为了方便,我们下面都用十进制来表示对应的代码。
对应的 MIPS 指令里 opcode 是 0,rs 代表第一个寄存器 s1 的地址是 17,rt 代表第二个寄存器 s2 的地址是 18,rd 代表目标的临时寄存器 t0 的地址,是 8。因为不是位移操作,所以位移量是 0。把这些数字拼在一起,就变成了一个 MIPS 的加法指令。
为了读起来方便,我们一般把对应的二进制数,用 16 进制表示出来。在这里,也就是 0X02324020。这个数字也就是这条指令对应的机器码。
回到开头我们说的打孔带。如果我们用打孔代表 1,没有打孔代表 0,用 4 行 8 列代表一条指令来打一个穿孔纸带,那么这条命令大概就长这样:
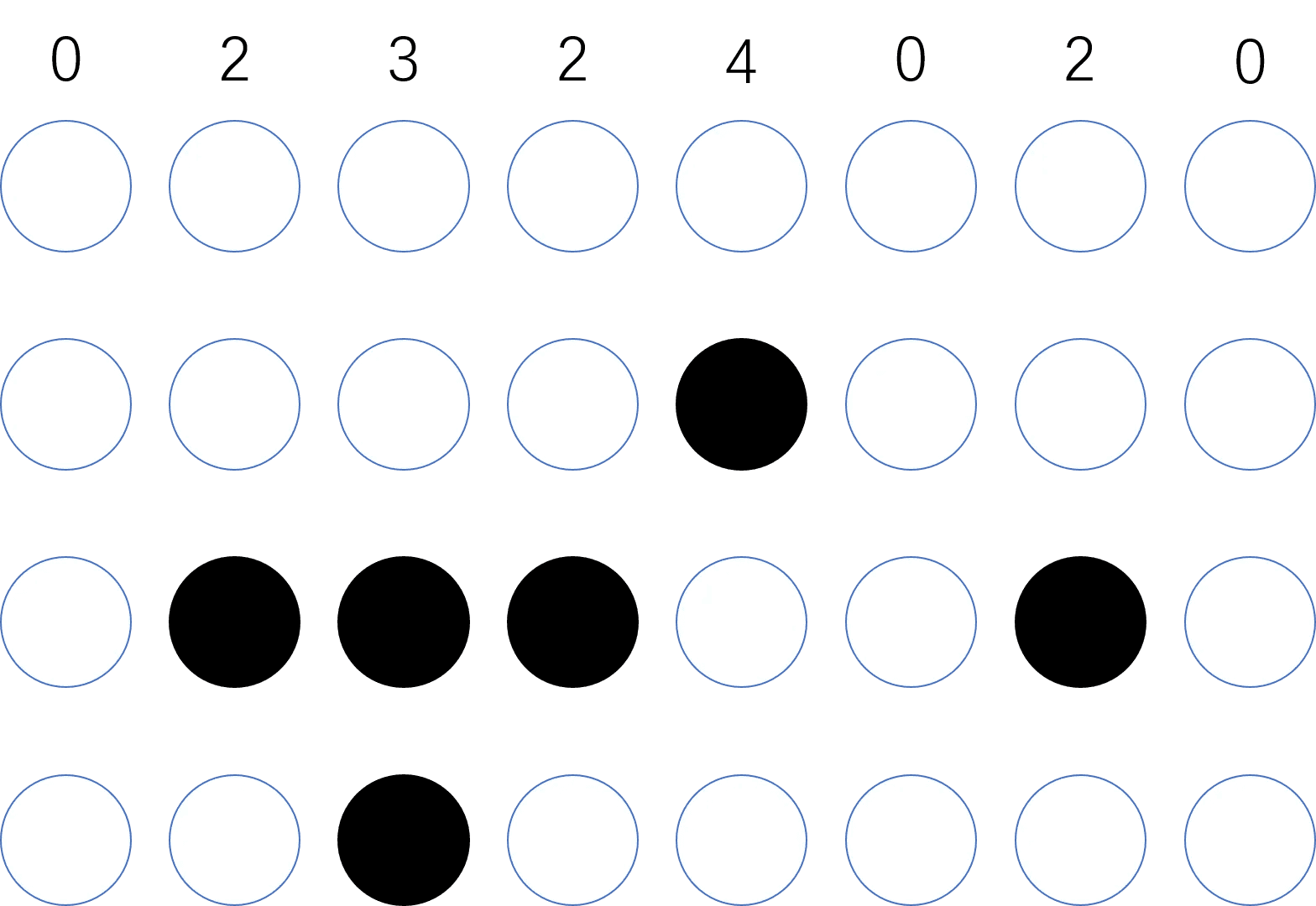
好了,恭喜你,读到这里,你应该学会了怎么作为人肉编译和汇编器,给纸带打孔编程了,不用再对那些用过打孔卡的前辈们顶礼膜拜了。
打孔卡,其实就是一种存储程序型计算机(冯诺依曼体系)。只是这整个程序的机器码,不是通过计算机编译出来的,而是由程序员,用人脑“编译”成一张张卡片的。对应的程序,也不是存储在设备里,而是存储成一张打好孔的卡片。但是整个程序运行的逻辑和其他 CPU 的机器语言没有什么分别,也是处理一串“0”和“1”组成的机器码而已。
我们用的是相对最简单的 MIPS 指令集作示例。想要对我们日常使用的 Intel CPU 的指令集有所了解,可以参看《计算机组成与设计:软 / 硬件接口》第 5 版的 2.17 小节。
拿我们用的 Intel CPU 来说,里面差不多有几百亿个晶体管。实际上,一条条计算机指令执行起来非常复杂。好在 CPU 在软件层面已经为我们做好了封装。对于我们这些做软件的程序员来说,我们只要知道,写好的代码变成了指令之后,是一条一条顺序执行的就可以了。
我们先不管几百亿的晶体管的背后是怎么通过电路运转起来的,逻辑上,我们可以认为,CPU 其实就是由一堆寄存器组成的。而寄存器就是 CPU 内部,由多个触发器(Flip-Flop)或者锁存器(Latches)组成的简单电路。
触发器和锁存器,其实就是两种不同原理的数字电路组成的逻辑门。这块内容并不是我们这节课的重点,所以你只要了解就好。如果想要深入学习的话,你可以学习数字电路的相关课程,这里我们不深入探讨。
好了,现在我们接着前面说。N 个触发器或者锁存器,就可以组成一个 N 位(Bit)的寄存器,能够保存 N 位的数据。比方说,我们用的 64 位 Intel 服务器,寄存器就是 64 位的。
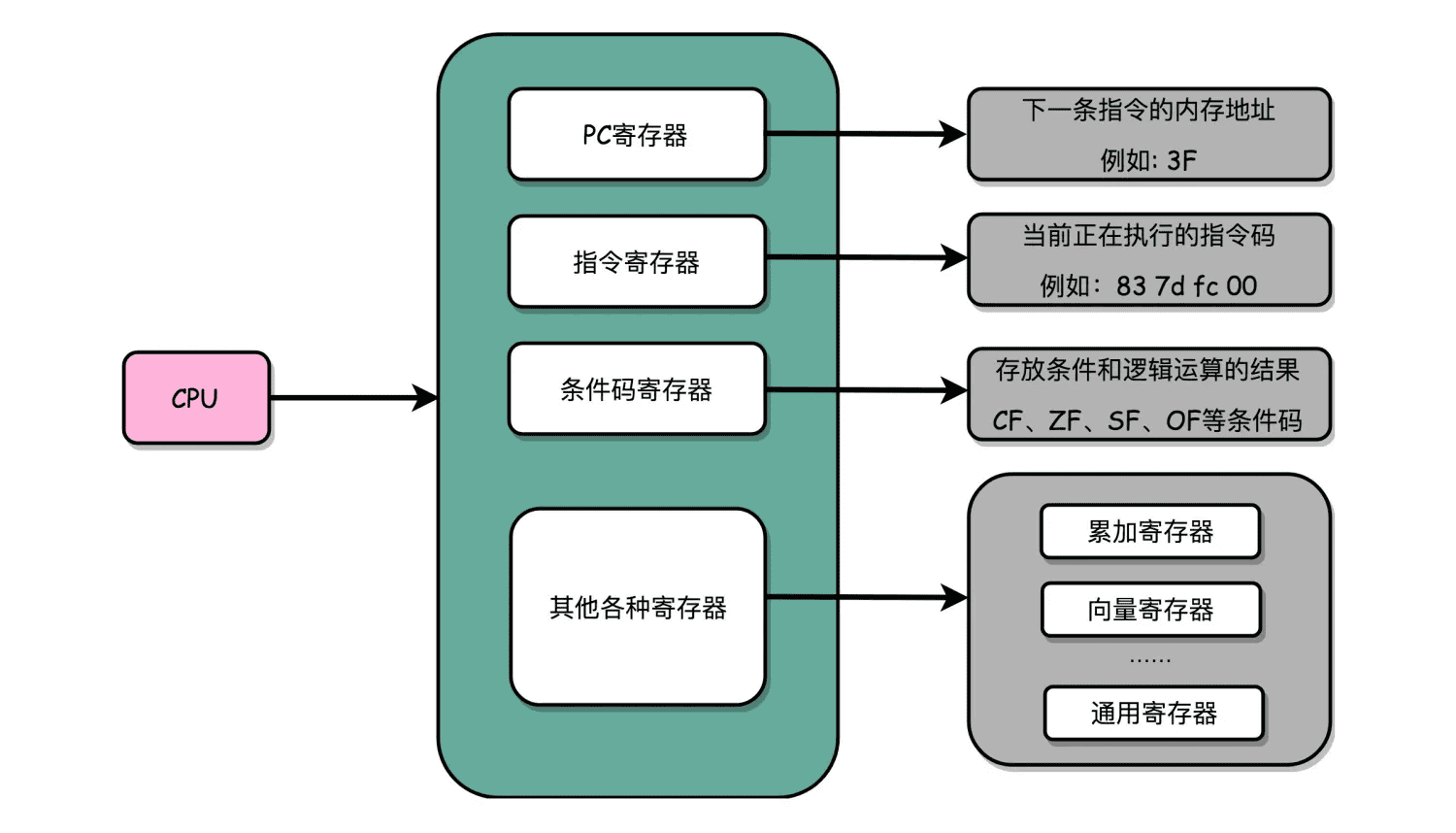
一个 CPU 里面会有很多种不同功能的寄存器。我这里给你介绍三种比较特殊的。
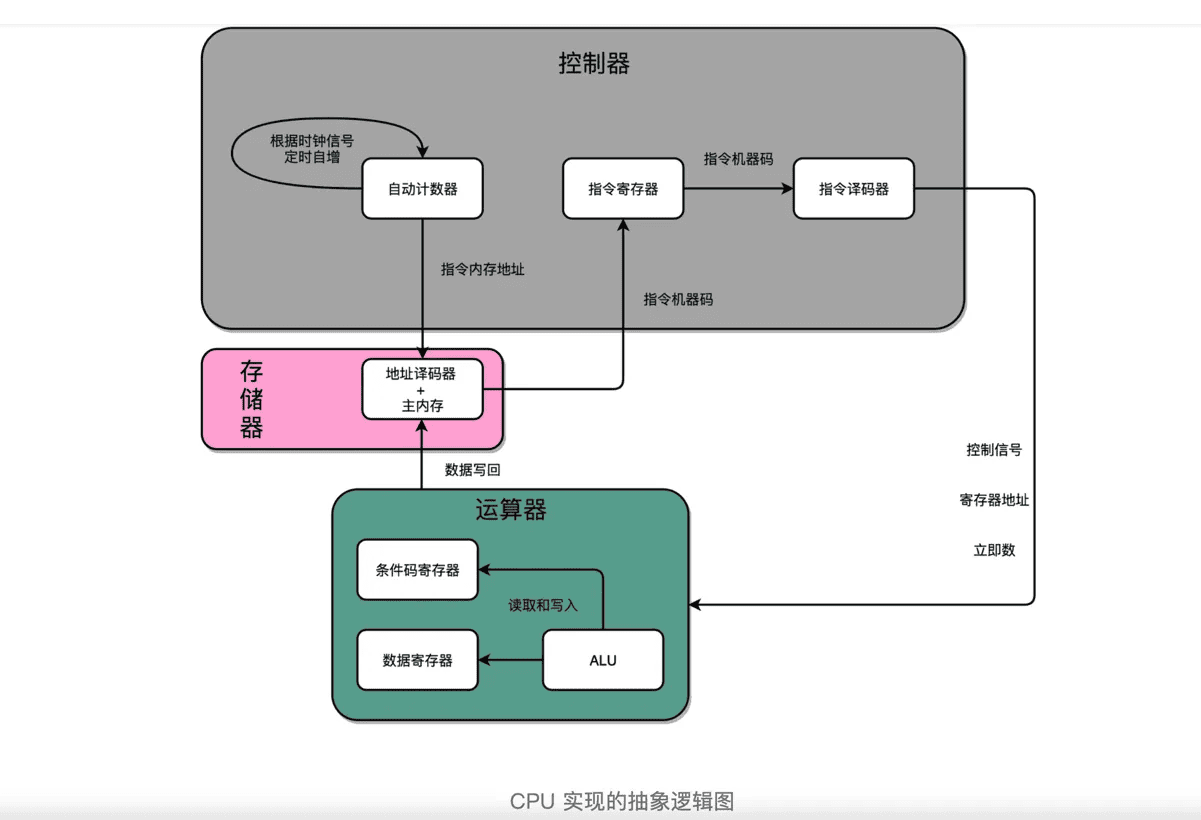
一个是PC 寄存器(Program Counter Register),我们也叫指令地址寄存器(Instruction Address Register)。顾名思义,它就是用来存放下一条需要执行的计算机指令的内存地址。
第二个是指令寄存器(Instruction Register),用来存放当前正在执行的指令。
第三个是条件码寄存器(Status Register),用里面的一个一个标记位(Flag),存放 CPU 进行算术或者逻辑计算的结果。
除了这些特殊的寄存器,CPU 里面还有更多用来存储数据和内存地址的寄存器。这样的寄存器通常一类里面不止一个。我们通常根据存放的数据内容来给它们取名字,比如整数寄存器、浮点数寄存器、向量寄存器和地址寄存器等等。有些寄存器既可以存放数据,又能存放地址,我们就叫它通用寄存器。
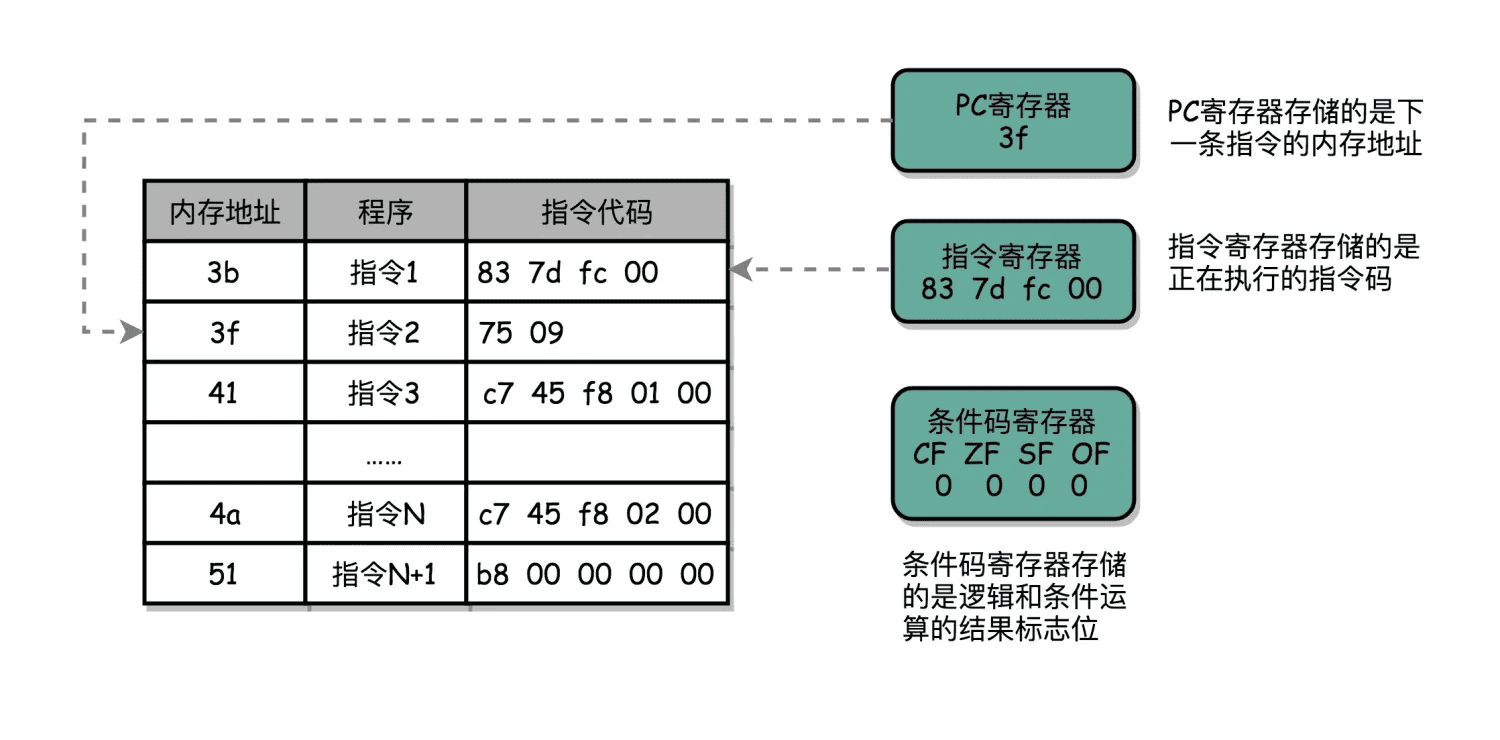
实际上,一个程序执行的时候,CPU 会根据 PC 寄存器里的地址,从内存里面把需要执行的指令读取到指令寄存器里面执行,然后根据指令长度自增,开始顺序读取下一条指令。可以看到,一个程序的一条条指令,在内存里面是连续保存的,也会一条条顺序加载。
而有些特殊指令,比如上一讲我们讲到 J 类指令,也就是跳转指令,会修改 PC 寄存器里面的地址值。这样,下一条要执行的指令就不是从内存里面顺序加载的了。事实上,这些跳转指令的存在,也是我们可以在写程序的时候,使用 if…else 条件语句和 while/for 循环语句的原因。
除了简单地通过 PC 寄存器自增的方式顺序执行外,条件码寄存器会记录下当前执行指令的条件判断状态,然后通过跳转指令读取对应的条件码,修改 PC 寄存器内的下一条指令的地址,最终实现 if…else 以及 for/while 这样的程序控制流程。
为什么同样一个程序,在 Linux 下可以执行而在 Windows 下不能执行?
其中一个非常重要的原因就是,两个操作系统下可执行文件的格式不一样。
我们今天讲的是 Linux 下的 ELF 文件格式,而 Windows 的可执行文件格式是一种叫作PE(Portable Executable Format)的文件格式。Linux 下的装载器只能解析 ELF 格式而不能解析 PE 格式。
如果我们有一个可以能够解析 PE 格式的装载器,我们就有可能在 Linux 下运行 Windows 程序了。这样的程序真的存在吗?没错,Linux 下著名的开源项目 Wine,就是通过兼容 PE 格式的装载器,使得我们能直接在 Linux 下运行 Windows 程序的。而现在微软的 Windows 里面也提供了 WSL,也就是 Windows Subsystem for Linux,可以解析和加载 ELF 格式的文件。
我们去写可以用的程序,也不仅仅是把所有代码放在一个文件里来编译执行,而是可以拆分成不同的函数库,最后通过一个静态链接的机制,使得不同的文件之间既有分工,又能通过静态链接来“合作”,变成一个可执行的程序。
对于 ELF 格式的文件,为了能够实现这样一个静态链接的机制,里面不只是简单罗列了程序所需要执行的指令,还会包括链接所需要的重定位表和符号表。
完整编译过程:
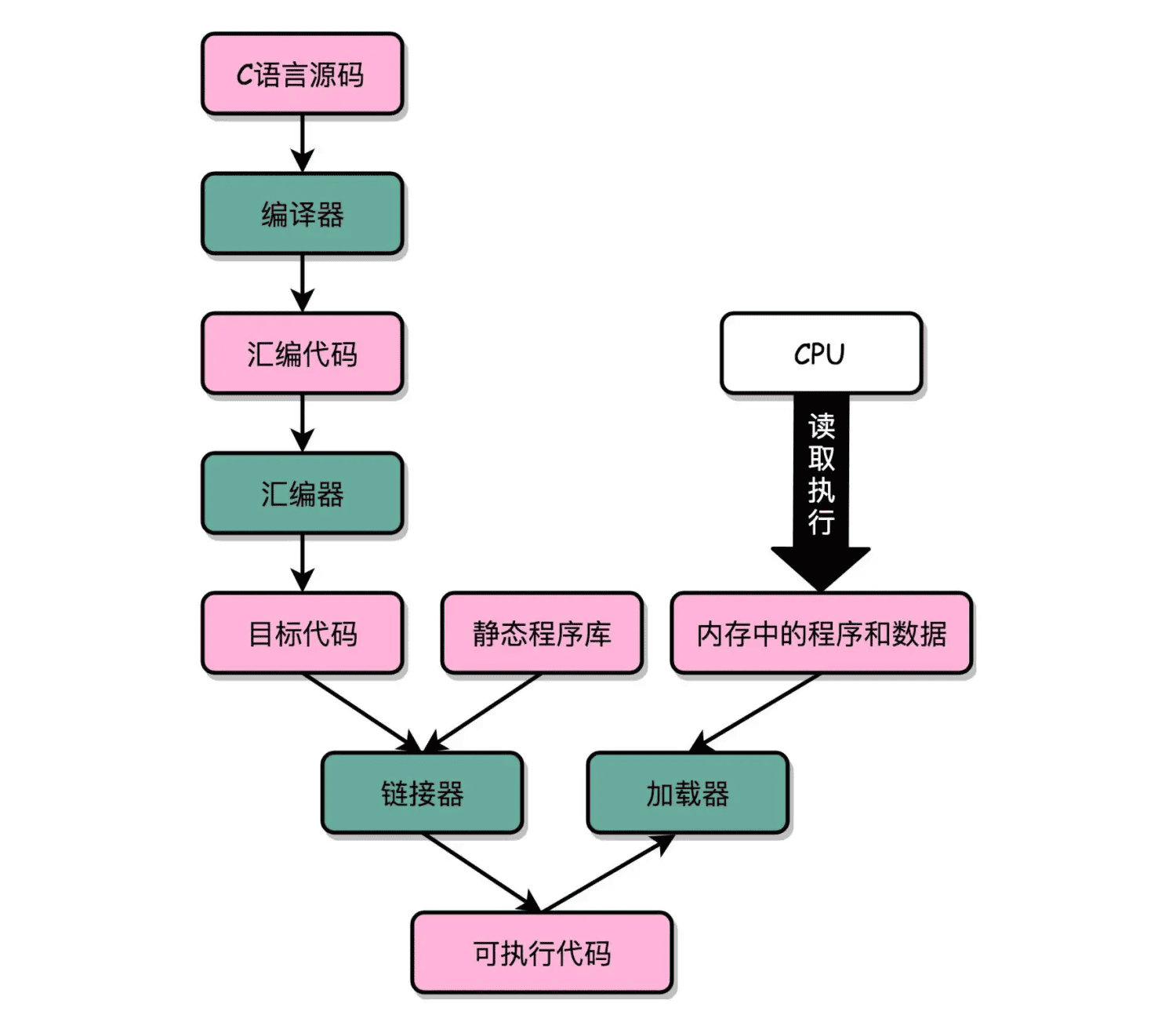
实际上,“C 语言代码 - 汇编代码 - 机器码” 这个过程,在我们的计算机上进行的时候是由两部分组成的。
第一个部分由编译(Compile)、汇编(Assemble)以及链接(Link)三个阶段组成。在这三个阶段完成之后,我们就生成了一个可执行文件。
第二部分,我们通过装载器(Loader)把可执行文件装载(Load)到内存中。CPU 从内存中读取指令和数据,来开始真正执行程序。
在 Linux 下,可执行文件和目标文件所使用的都是一种叫ELF(Execuatable and Linkable File Format)的文件格式,中文名字叫可执行与可链接文件格式,这里面不仅存放了编译成的汇编指令,还保留了很多别的数据。
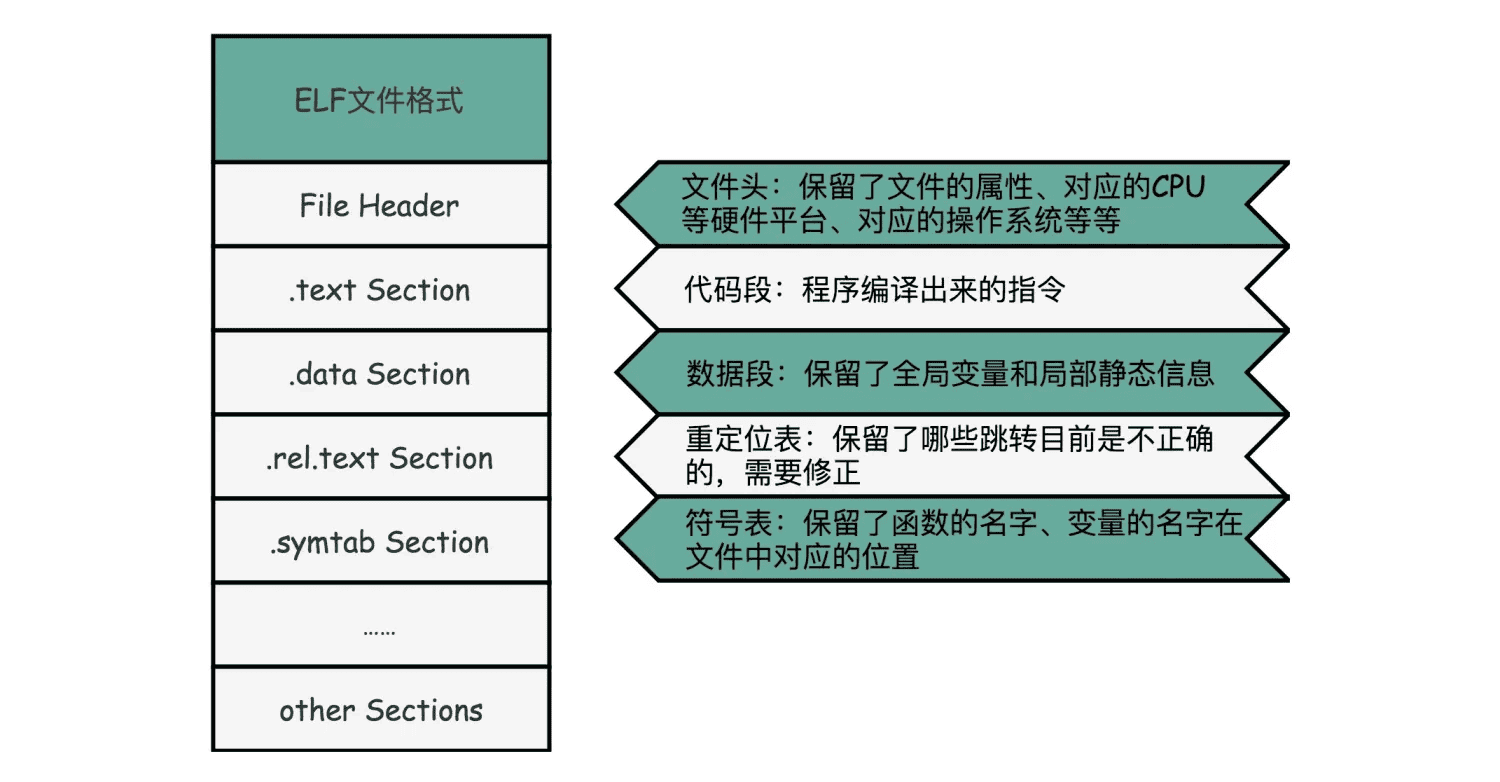
ELF 文件格式把各种信息,分成一个一个的 Section 保存起来。ELF 有一个基本的文件头(File Header),用来表示这个文件的基本属性,比如是否是可执行文件,对应的 CPU、操作系统等等。除了这些基本属性之外,大部分程序还有这么一些 Section:
首先是.text Section,也叫作代码段或者指令段(Code Section),用来保存程序的代码和指令;
接着是.data Section,也叫作数据段(Data Section),用来保存程序里面设置好的初始化数据信息;
然后就是.rel.text Secion,叫作重定位表(Relocation Table)。重定位表里,保留的是当前的文件里面,哪些跳转地址其实是我们不知道的。比如上面的 link_example.o 里面,我们在 main 函数里面调用了 add 和 printf 这两个函数,但是在链接发生之前,我们并不知道该跳转到哪里,这些信息就会存储在重定位表里;
最后是.symtab Section,叫作符号表(Symbol Table)。符号表保留了我们所说的当前文件里面定义的函数名称和对应地址的地址簿。
链接器会扫描所有输入的目标文件,然后把所有符号表里的信息收集起来,构成一个全局的符号表。然后再根据重定位表,把所有不确定要跳转地址的代码,根据符号表里面存储的地址,进行一次修正。最后,把所有的目标文件的对应段进行一次合并,变成了最终的可执行代码。这也是为什么,可执行文件里面的函数调用的地址都是正确的。
在链接器把程序变成可执行文件之后,要装载器去执行程序就容易多了。装载器不再需要考虑地址跳转的问题,只需要解析 ELF 文件,把对应的指令和数据,加载到内存里面供 CPU 执行就可以了。
想要更深入了解程序的链接过程和 ELF 格式,我推荐你阅读《程序员的自我修养——链接、装载和库》的 1~4 章。这是一本难得的讲解程序的链接、装载和运行的好书。
我们看到了如何通过链接器,把多个文件合并成一个最终可执行文件。在运行这些可执行文件的时候,我们其实是通过一个装载器,解析 ELF 或者 PE 格式的可执行文件。装载器会把对应的指令和数据加载到内存里面来,让 CPU 去执行。
说起来只是装载到内存里面这一句话的事儿,实际上装载器需要满足两个要求。
第一,可执行程序加载后占用的内存空间应该是连续的。
第二,我们需要同时加载很多个程序,并且不能让程序自己规定在内存中加载的位置。
我们可以在内存里面,找到一段连续的内存空间,然后分配给装载的程序,然后把这段连续的内存空间地址,和整个程序指令里指定的内存地址做一个映射。
我们把指令里用到的内存地址叫作虚拟内存地址(Virtual Memory Address),实际在内存硬件里面的空间地址,我们叫物理内存地址(Physical Memory Address)。
程序里有指令和各种内存地址,我们只需要关心虚拟内存地址就行了。对于任何一个程序来说,它看到的都是同样的内存地址。我们维护一个虚拟内存到物理内存的映射表,这样实际程序指令执行的时候,会通过虚拟内存地址,找到对应的物理内存地址,然后执行。因为是连续的内存地址空间,所以我们只需要维护映射关系的起始地址和对应的空间大小就可以了。
找出一段连续的物理内存和虚拟内存地址进行映射的方法,我们叫分段(Segmentation)。这里的段,就是指系统分配出来的那个连续的内存空间。
分段的办法很好,解决了程序本身不需要关心具体的物理内存地址的问题,但它也有一些不足之处,第一个就是内存碎片(Memory Fragmentation)的问题。
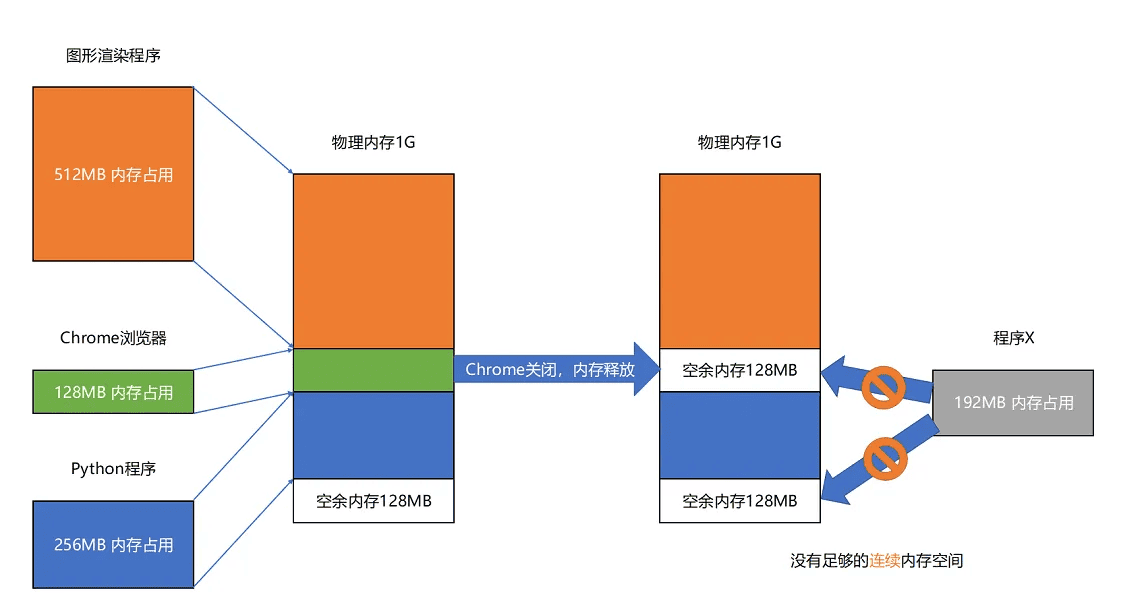
当然,这个我们也有办法解决。解决的办法叫内存交换(Memory Swapping)。
我们可以把 Python 程序占用的那 256MB 内存写到硬盘上,然后再从硬盘上读回来到内存里面。不过读回来的时候,我们不再把它加载到原来的位置,而是紧紧跟在那已经被占用了的 512MB 内存后面。这样,我们就有了连续的 256MB 内存空间,就可以去加载一个新的 200MB 的程序。如果你自己安装过 Linux 操作系统,你应该遇到过分配一个 swap 硬盘分区的问题。这块分出来的磁盘空间,其实就是专门给 Linux 操作系统进行内存交换用的。
虚拟内存、分段,再加上内存交换,看起来似乎已经解决了计算机同时装载运行很多个程序的问题。不过,你千万不要大意,这三者的组合仍然会遇到一个性能瓶颈。硬盘的访问速度要比内存慢很多,而每一次内存交换,我们都需要把一大段连续的内存数据写到硬盘上。所以,如果内存交换的时候,交换的是一个很占内存空间的程序,这样整个机器都会显得卡顿。
既然问题出在内存碎片和内存交换的空间太大上,那么解决问题的办法就是,少出现一些内存碎片。另外,当需要进行内存交换的时候,让需要交换写入或者从磁盘装载的数据更少一点,这样就可以解决这个问题。这个办法,在现在计算机的内存管理里面,就叫作内存分页(Paging)。
和分段这样分配一整段连续的空间给到程序相比,分页是把整个物理内存空间切成一段段固定尺寸的大小。而对应的程序所需要占用的虚拟内存空间,也会同样切成一段段固定尺寸的大小。这样一个连续并且尺寸固定的内存空间,我们叫页(Page)。从虚拟内存到物理内存的映射,不再是拿整段连续的内存的物理地址,而是按照一个一个页来的。页的尺寸一般远远小于整个程序的大小。在 Linux 下,我们通常只设置成 4KB。你可以通过命令看看你手头的 Linux 系统设置的页的大小。
$getconf PAGE_SIZE
由于内存空间都是预先划分好的,也就没有了不能使用的碎片,而只有被释放出来的很多 4KB 的页。即使内存空间不够,需要让现有的、正在运行的其他程序,通过内存交换释放出一些内存的页出来,一次性写入磁盘的也只有少数的一个页或者几个页,不会花太多时间,让整个机器被内存交换的过程给卡住。
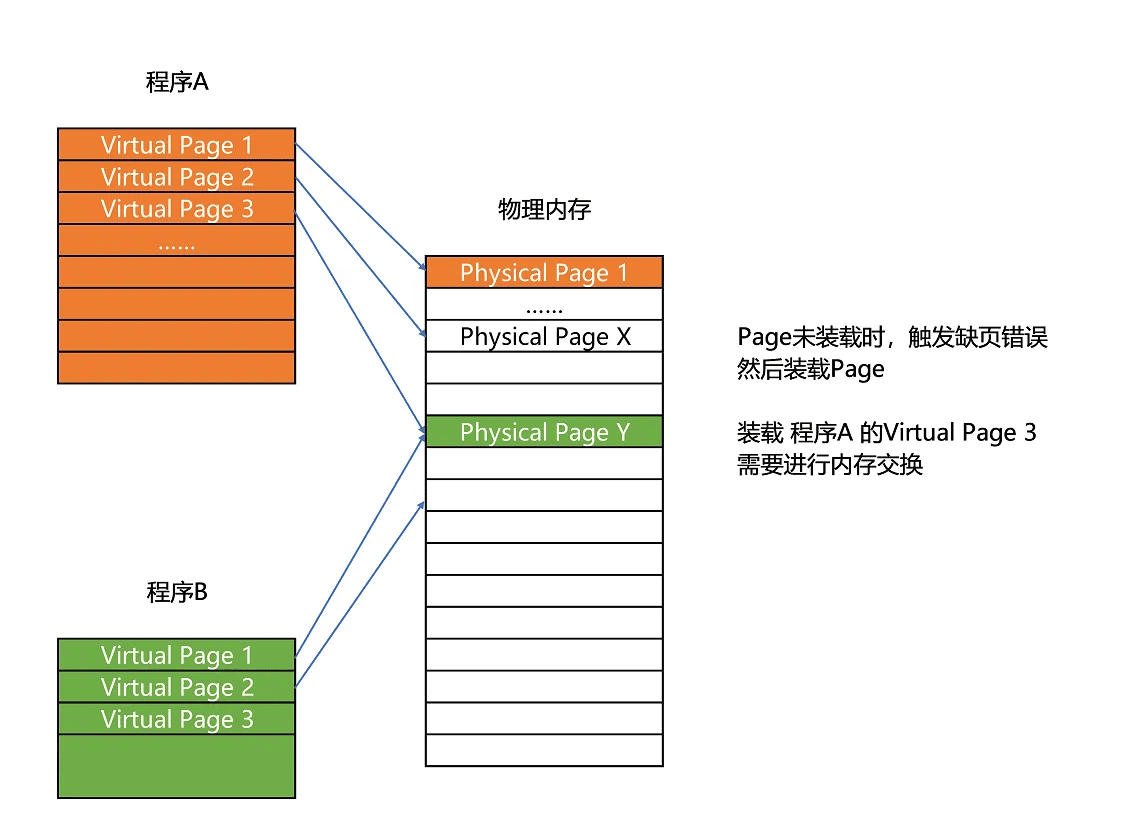
更进一步地,分页的方式使得我们在加载程序的时候,不再需要一次性都把程序加载到物理内存中。我们完全可以在进行虚拟内存和物理内存的页之间的映射之后,并不真的把页加载到物理内存里,而是只在程序运行中,需要用到对应虚拟内存页里面的指令和数据时,再加载到物理内存里面去。
实际上,我们的操作系统,的确是这么做的。当要读取特定的页,却发现数据并没有加载到物理内存里的时候,就会触发一个来自于 CPU 的缺页错误(Page Fault)。我们的操作系统会捕捉到这个错误,然后将对应的页,从存放在硬盘上的虚拟内存里读取出来,加载到物理内存里。这种方式,使得我们可以运行那些远大于我们实际物理内存的程序。同时,这样一来,任何程序都不需要一次性加载完所有指令和数据,只需要加载当前需要用到就行了。
通过虚拟内存、内存交换和内存分页这三个技术的组合,我们最终得到了一个让程序不需要考虑实际的物理内存地址、大小和当前分配空间的解决方案。这些技术和方法,对于我们程序的编写、编译和链接过程都是透明的。这也是我们在计算机的软硬件开发中常用的一种方法,就是加入一个间接层。
通过引入虚拟内存、页映射和内存交换,我们的程序本身,就不再需要考虑对应的真实的内存地址、程序加载、内存管理等问题了。任何一个程序,都只需要把内存当成是一块完整而连续的空间来直接使用。
想要更深入地了解代码装载的详细过程,推荐你阅读《程序员的自我修养——链接、装载和库》的第 1 章和第 6 章。
链接可以分动、静,共享运行省内存
们之前说的合并代码段的方法,就是静态链接(Static Link)。
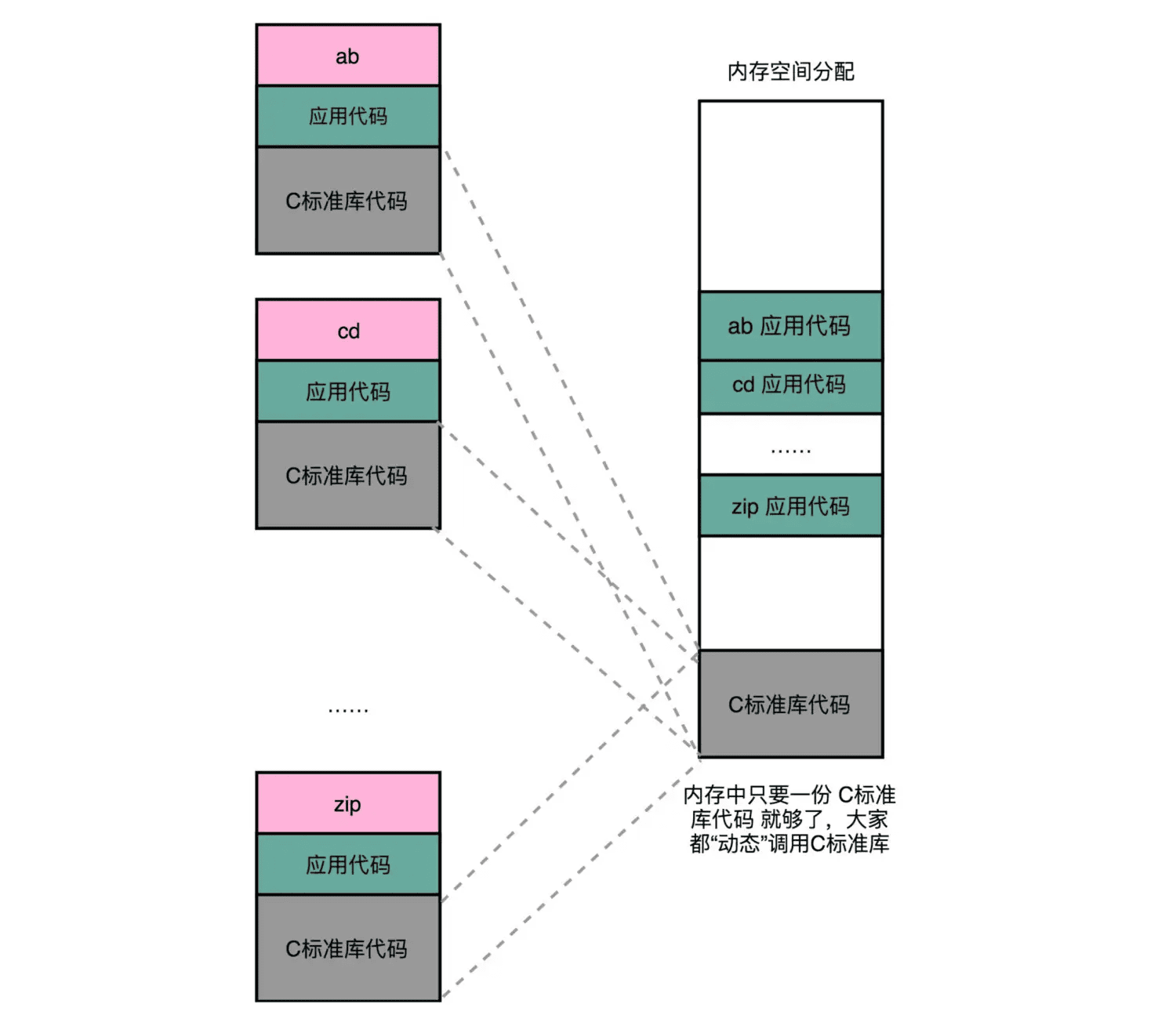
在动态链接的过程中,我们想要“链接”的,不是存储在硬盘上的目标文件代码,而是加载到内存中的共享库(Shared Libraries)。顾名思义,这里的共享库重在“共享“这两个字。
这个加载到内存中的共享库会被很多个程序的指令调用到。在 Windows 下,这些共享库文件就是.dll 文件,也就是 Dynamic-Link Libary(DLL,动态链接库)。在 Linux 下,这些共享库文件就是.so 文件,也就是 Shared Object(一般我们也称之为动态链接库)。这两大操作系统下的文件名后缀,一个用了“动态链接”的意思,另一个用了“共享”的意思,正好覆盖了两方面的含义。
想要更加深入地了解动态链接,我推荐你可以读一读《程序员的自我修养:链接、装载和库》的第 7 章,里面深入地讲解了,动态链接里程序内的数据布局和对应数据的加载关系。
二进制与UTF编码:
最大的 32 位整数,就是 2147483647。如果用整数表示法,只需要 32 位就能表示了。但是如果用字符串来表示,一共有 10 个字符,每个字符用 8 位的话,需要整整 80 位。比起整数表示法,要多占很多空间。
这也是为什么,很多时候我们在存储数据的时候,要采用二进制序列化这样的方式,而不是简单地把数据通过 CSV 或者 JSON,这样的文本格式存储来进行序列化。不管是整数也好,浮点数也好,采用二进制序列化会比存储文本省下不少空间。
ASCII 码只表示了 128 个字符,一开始倒也堪用,毕竟计算机是在美国发明的。然而随着越来越多的不同国家的人都用上了计算机,想要表示譬如中文这样的文字,128 个字符显然是不太够用的。于是,计算机工程师们开始各显神通,给自己国家的语言创建了对应的字符集(Charset)和字符编码(Character Encoding)。
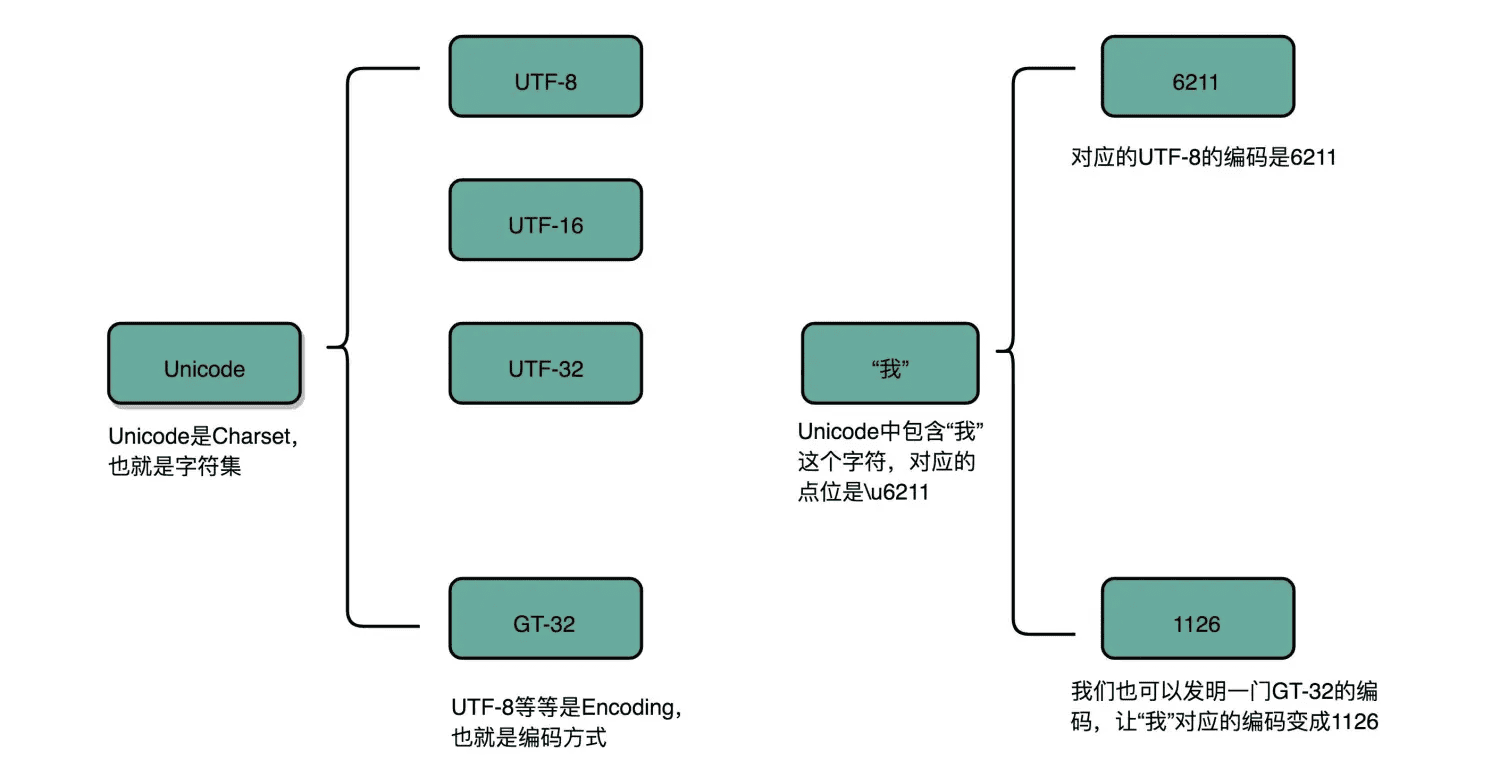
字符集,表示的可以是字符的一个集合。比如“中文”就是一个字符集,不过这样描述一个字符集并不准确。想要更精确一点,我们可以说,“第一版《新华字典》里面出现的所有汉字”,这是一个字符集。这样,我们才能明确知道,一个字符在不在这个集合里面。比如,我们日常说的 Unicode,其实就是一个字符集,包含了 150 种语言的 14 万个不同的字符。
而字符编码则是对于字符集里的这些字符,怎么一一用二进制表示出来的一个字典。我们上面说的 Unicode,就可以用 UTF-8、UTF-16,乃至 UTF-32 来进行编码,存储成二进制。所以,有了 Unicode,其实我们可以用不止 UTF-8 一种编码形式,我们也可以自己发明一套 GT-32 编码,比如就叫作 Geek Time 32 好了。只要别人知道这套编码规则,就可以正常传输、显示这段代码。
同样的文本,采用不同的编码存储下来。如果另外一个程序,用一种不同的编码方式来进行解码和展示,就会出现乱码。这就好像两个军队用密语通信,如果用错了密码本,那看到的消息就会不知所云。
锟斤拷与烫烫烫
“锟斤拷”的来源是这样的。如果我们想要用 Unicode 编码记录一些文本,特别是一些遗留的老字符集内的文本,但是这些字符在 Unicode 中可能并不存在。于是,Unicode 会统一把这些字符记录为 U+FFFD 这个编码。如果用 UTF-8 的格式存储下来,就是\xef\xbf\xbd。如果连续两个这样的字符放在一起,\xef\xbf\xbd\xef\xbf\xbd,这个时候,如果程序把这个字符,用 GB2312 的方式进行 decode,就会变成“锟斤拷”。这就好比我们用 GB2312 这本密码本,去解密别人用 UTF-8 加密的信息,自然没办法读出有用的信息。 而“烫烫烫”,则是因为如果你用了 Visual Studio 的调试器,默认使用 MBCS 字符集。“烫”在里面是由 0xCCCC 来表示的,而 0xCC 又恰好是未初始化的内存的赋值。于是,在读到没有赋值的内存地址或者变量的时候,电脑就开始大叫“烫烫烫”了。
电报是现代计算机的一个最简单的原型。它和我们现在使用的现代计算机有很多相似之处。我们通过电路的“开”和“关”,来表示“1”和“0”。就像晶体管在不同的情况下,表现为导电的“1”和绝缘的“0”的状态。
《编码:隐匿在计算机软硬件背后的语言》的第 6~11 章,是一个很好的入门材料,可以帮助你深入理解数字电路,值得你花时间好好读一读。
简单的 “与(AND)”“或(OR)”“NOT(非)”和“异或(XOR)”,这样最基本的单比特逻辑运算。下面这些门电路的标识,你需要非常熟悉,后续的电路都是由这些门电路组合起来的。
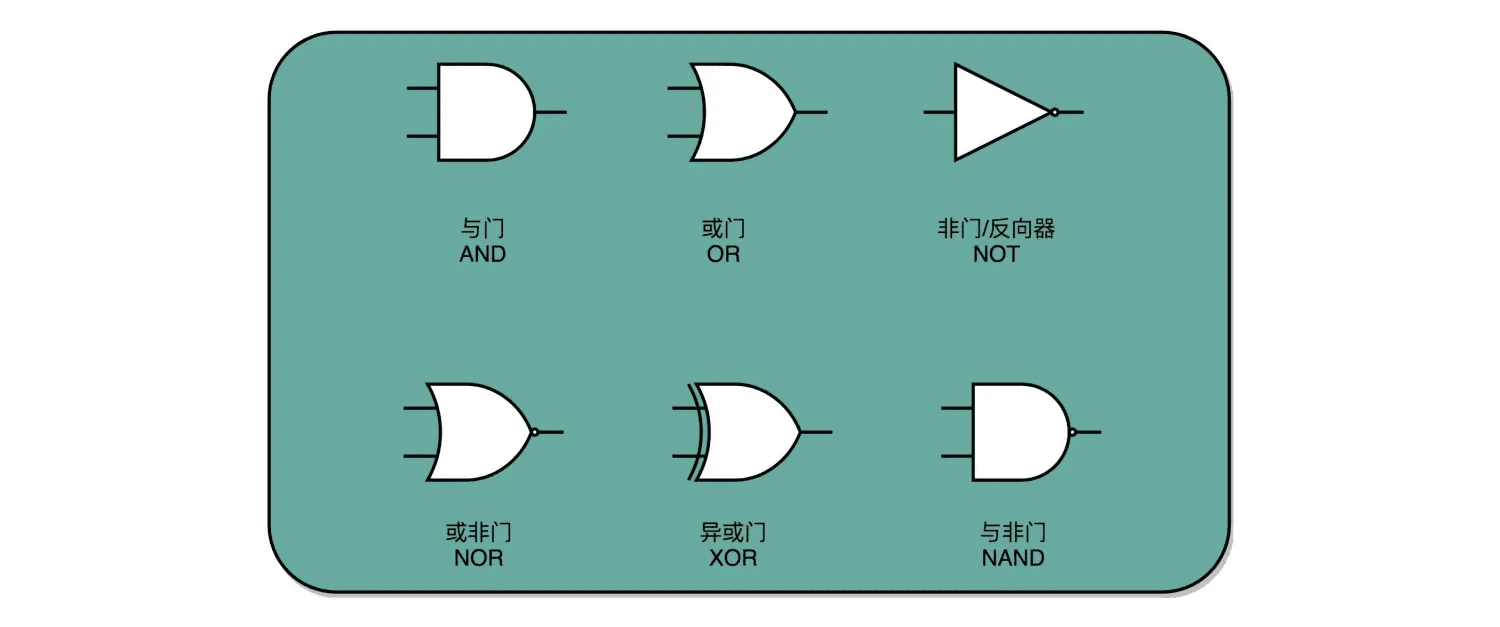
这些基本的门电路,是我们计算机硬件端的最基本的“积木”,就好像乐高积木里面最简单的小方块。看似不起眼,但是把它们组合起来,最终可以搭出一个星球大战里面千年隼这样的大玩意儿。我们今天包含十亿级别晶体管的现代 CPU,都是由这样一个一个的门电路组合而成的。
半加器:
讲与、或、非门的时候,我们很容易就能和程序里面的“AND(通常是 & 符号)”“ OR(通常是 | 符号)”和“ NOT(通常是 ! 符号)”对应起来。可能你没有想过,为什么我们会需要“异或(XOR)”,这样一个在逻辑运算里面没有出现的形式,作为一个基本电路。其实,异或门就是一个最简单的整数加法,所需要使用的基本门电路。
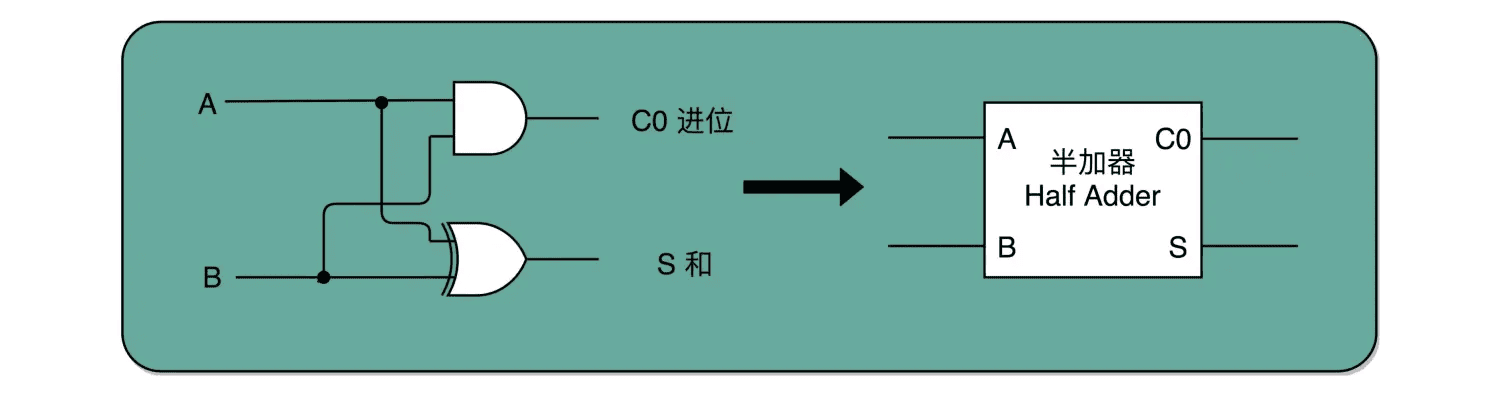
算完个位的输出还不算完,输入的两位都是 11 的时候,我们还需要向更左侧的一位进行进位。那这个就对应一个与门,也就是有且只有在加数和被加数都是 1 的时候,我们的进位才会是 1。
所以,通过一个异或门计算出个位,通过一个与门计算出是否进位,我们就通过电路算出了一个一位数的加法。于是,我们把两个门电路打包,给它取一个名字,就叫作半加器(Half Adder)。
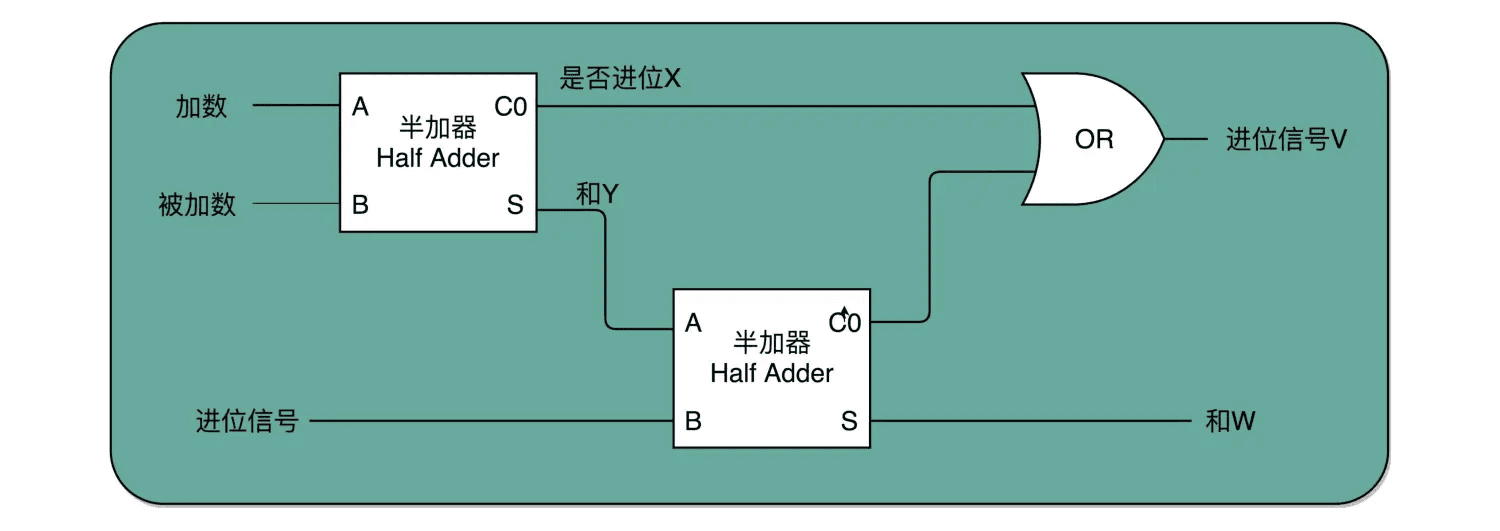
二位用一个半加器不能计算完成的原因也很简单。因为二位除了一个加数和被加数之外,还需要加上来自个位的进位信号,一共需要三个数进行相加,才能得到结果。但是我们目前用到的,无论是最简单的门电路,还是用两个门电路组合而成的半加器,输入都只能是两个 bit,也就是两个开关。那我们该怎么办呢?
实际上,解决方案也并不复杂。我们用两个半加器和一个或门,就能组合成一个全加器。第一个半加器,我们用和个位的加法一样的方式,得到是否进位 X 和对应的二个数加和后的结果 Y,这样两个输出。然后,我们把这个加和后的结果 Y,和个位数相加后输出的进位信息 U,再连接到一个半加器上,就会再拿到一个是否进位的信号 V 和对应的加和后的结果 W。
有了全加器,我们要进行对应的两个 8 bit 数的加法就很容易了。我们只要把 8 个全加器串联起来就好了。个位的全加器的进位信号作为二位全加器的输入信号,二位全加器的进位信号再作为四位的全加器的进位信号。这样一层层串接八层,我们就得到了一个支持 8 位数加法的算术单元。如果要扩展到 16 位、32 位,乃至 64 位,都只需要多串联几个输入位和全加器就好了。
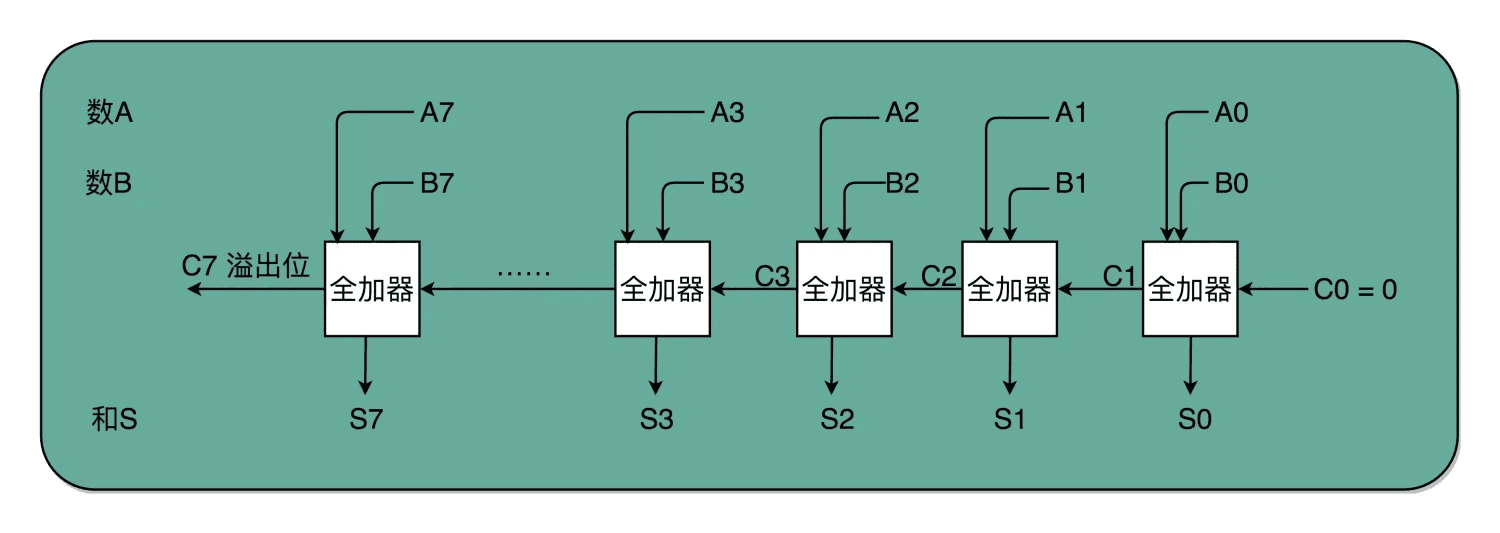
唯一需要注意的是,对于这个全加器,在个位,我们只需要用一个半加器,或者让全加器的进位输入始终是 0。因为个位没有来自更右侧的进位。而最左侧的一位输出的进位信号,表示的并不是再进一位,而是表示我们的加法是否溢出了。
这也是很有意思的一点。以前我自己在了解二进制加法的时候,一直有这么个疑问,既然 int 这样的 16 位的整数加法,结果也是 16 位数,那我们怎么知道加法最终是否溢出了呢?因为结果也只存得下加法结果的 16 位数。我们并没有留下一个第 17 位,来记录这个加法的结果是否溢出。
看到全加器的电路设计,相信你应该明白,在整个加法器的结果中,我们其实有一个电路的信号,会标识出加法的结果是否溢出。我们可以把这个对应的信号,输出给到硬件中其他标志位里,让我们的计算机知道计算的结果是否溢出。而现代计算机也正是这样做的。这就是为什么你在撰写程序的时候,能够知道你的计算结果是否溢出在硬件层面得到的支持。
出于性能考虑,实际 CPU 里面使用的加法器,比起我们今天讲解的电路还有些差别,会更复杂一些。真实的加法器,使用的是一种叫作超前进位加法器的东西。你可以找到北京大学在 Coursera 上开设的《计算机组成》课程中的 Video-306 “加法器优化”一节,了解一下超前进位加法器的实现原理,以及我们为什么要使用它。
通过之前两讲的 ALU 和门电路,搭建出来了乘法器。如果愿意的话,我们可以把很多在生活中不得不顺序执行的事情,通过简单地连结一下线路,就变成并行执行了。这是因为,硬件电路有一个很大的特点,那就是信号都是实时传输的。
通过精巧地设计电路,用较少的门电路和寄存器,就能够计算完成乘法这样相对复杂的运算。是用更少更简单的电路,但是需要更长的门延迟和时钟周期;还是用更复杂的电路,但是更短的门延迟和时钟周期来计算一个复杂的指令,这之间的权衡,其实就是计算机体系结构中 RISC 和 CISC 的经典历史路线之争。
如果还有什么细节你觉得还没有彻底弄明白,我推荐你看一看《计算机组成与设计:硬件 / 软件接口》的 3.3 节。
关于浮点数:
虽然浮点数能够表示的数据范围变大了很多,但是在实际应用的时候,由于存在精度损失,会导致加法的结果和我们的预期不同,乃至于完全没有加上的情况。
所以,一般情况下,在实践应用中,对于需要精确数值的,比如银行存款、电商交易,我们都会使用定点数或者整数类型。
对浮点数的表示还不是很清楚,你可以仔细阅读一下《计算机组成与设计:硬件 / 软件接口》的 3.5.1 节。
原理篇:处理器
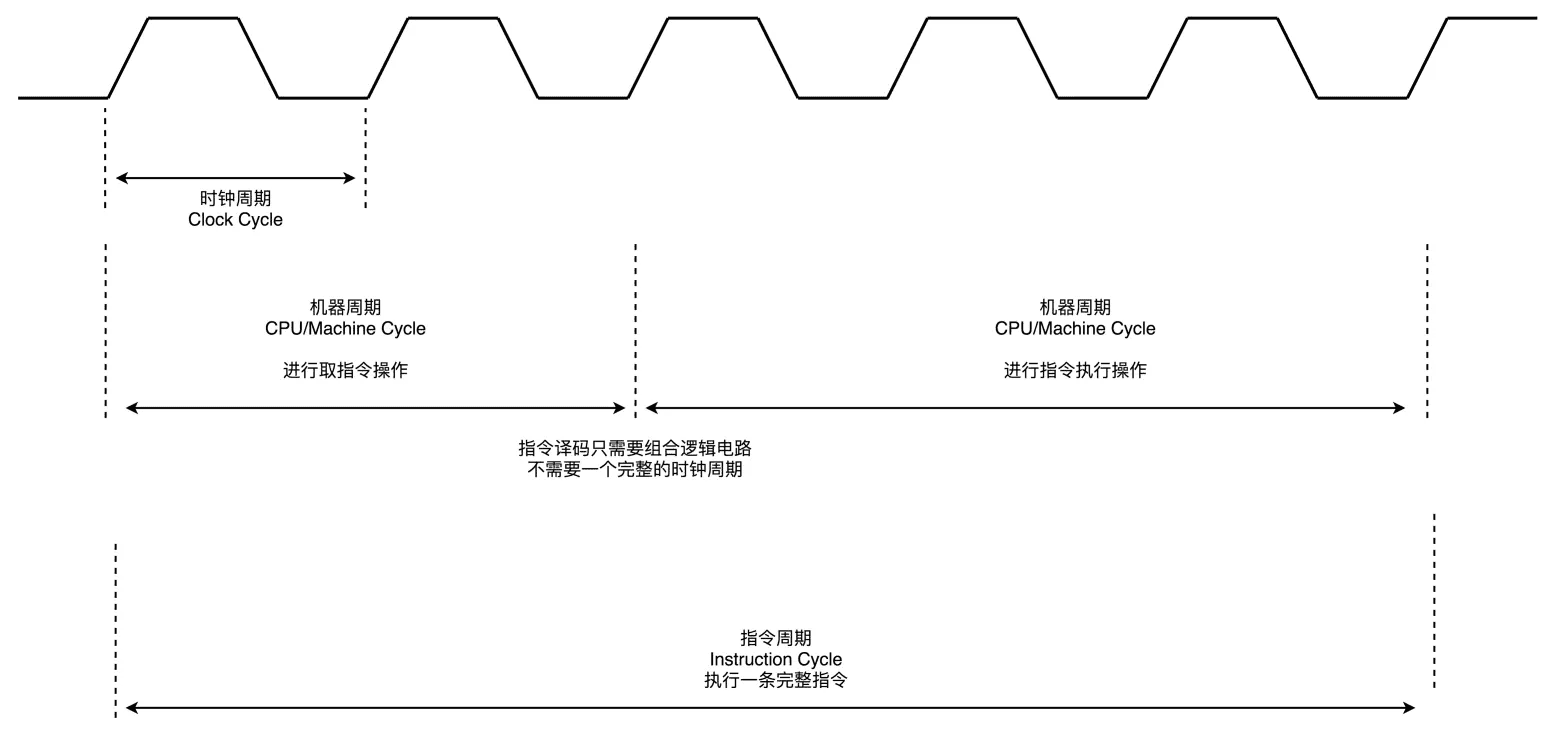
一个指令周期,包含多个 CPU 周期,而一个 CPU 周期包含多个时钟周期。
如果想要了解数据通路,可以参看《计算机组成与设计 硬件软件接口》的第 5 版的 4.1 到 4.4 节。专栏里的内容是从更高一层的抽象逻辑来解释这些问题,而教科书里包含了更多电路的技术细节。这两者结合起来学习,能够帮助你更深入地去理解数据通路。
电路的输出信号不单单取决于当前的输入信号,还要取决于输出信号之前的状态。最常见的这个电路就是我们的 D 触发器,它也是我们实际在 CPU 内实现存储功能的寄存器的实现方式。
这也是现代计算机体系结构中的“冯·诺伊曼”机的一个关键,就是程序需要可以“存储”,而不是靠固定的线路连接或者手工拨动开关,来实现计算机的可存储和可编程的功能。
想要深入了解计算机里面的各种功能组件,是怎么通过电路来实现的,推荐你去阅读《编码:隐匿在计算机软硬件背后的语言》这本书的第 14 章和 16 章。
如果对于数字电路和数字逻辑特别感兴趣,想要彻底弄清楚数字电路、时序逻辑电路,也可以看一看计算机学科的一本专业的教科书《数字逻辑应用与设计》。
《编码:隐匿在计算机软硬件背后的语言》的第 17 章,用更多细节的流程来讲解了 CPU 的数据通路。《计算机组成与设计 硬件 / 软件接口》的 4.1 到 4.4 小节,从另外一个层面和角度讲解了 CPU 的数据通路的建立,推荐你阅读一下。
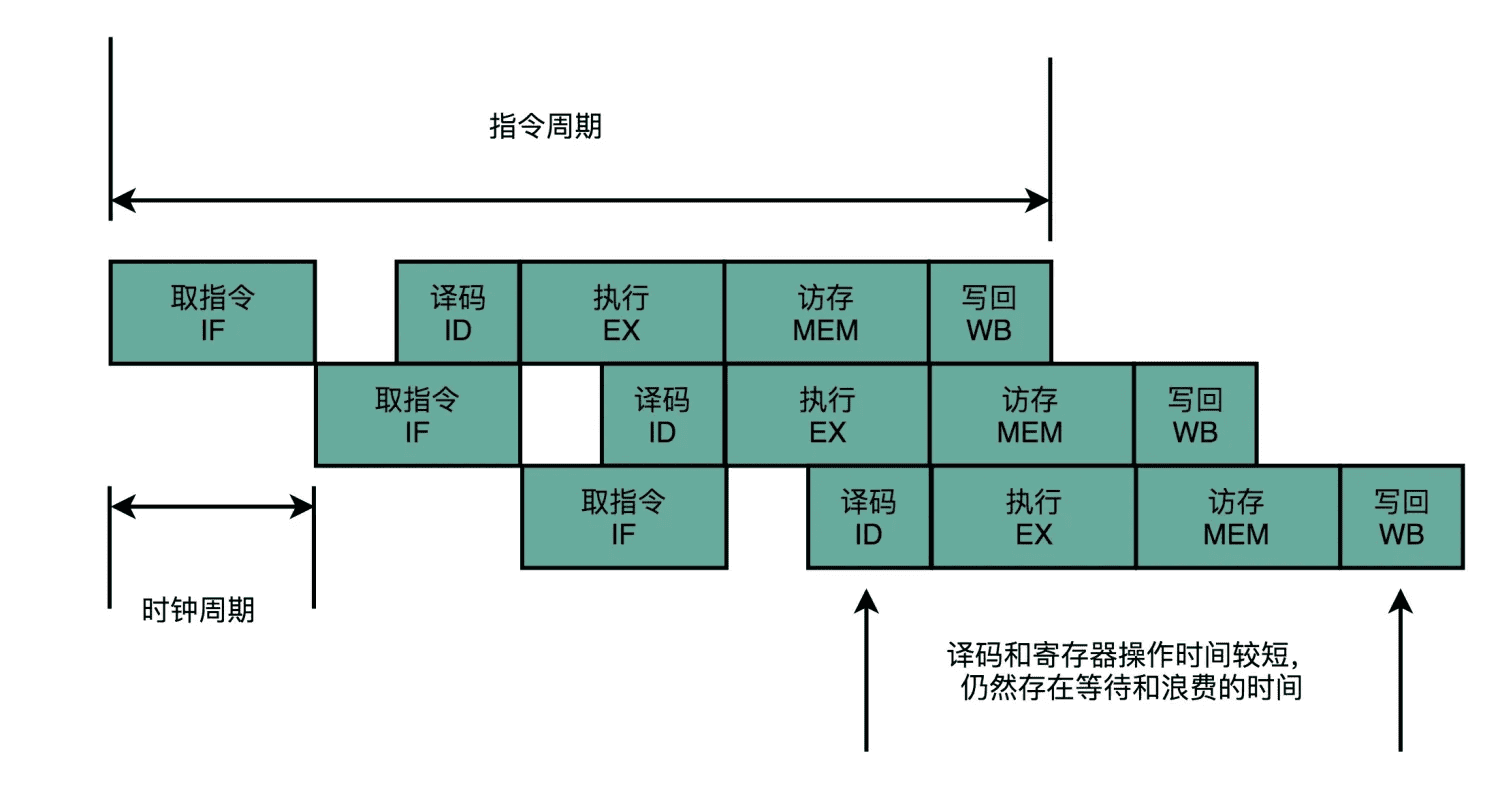
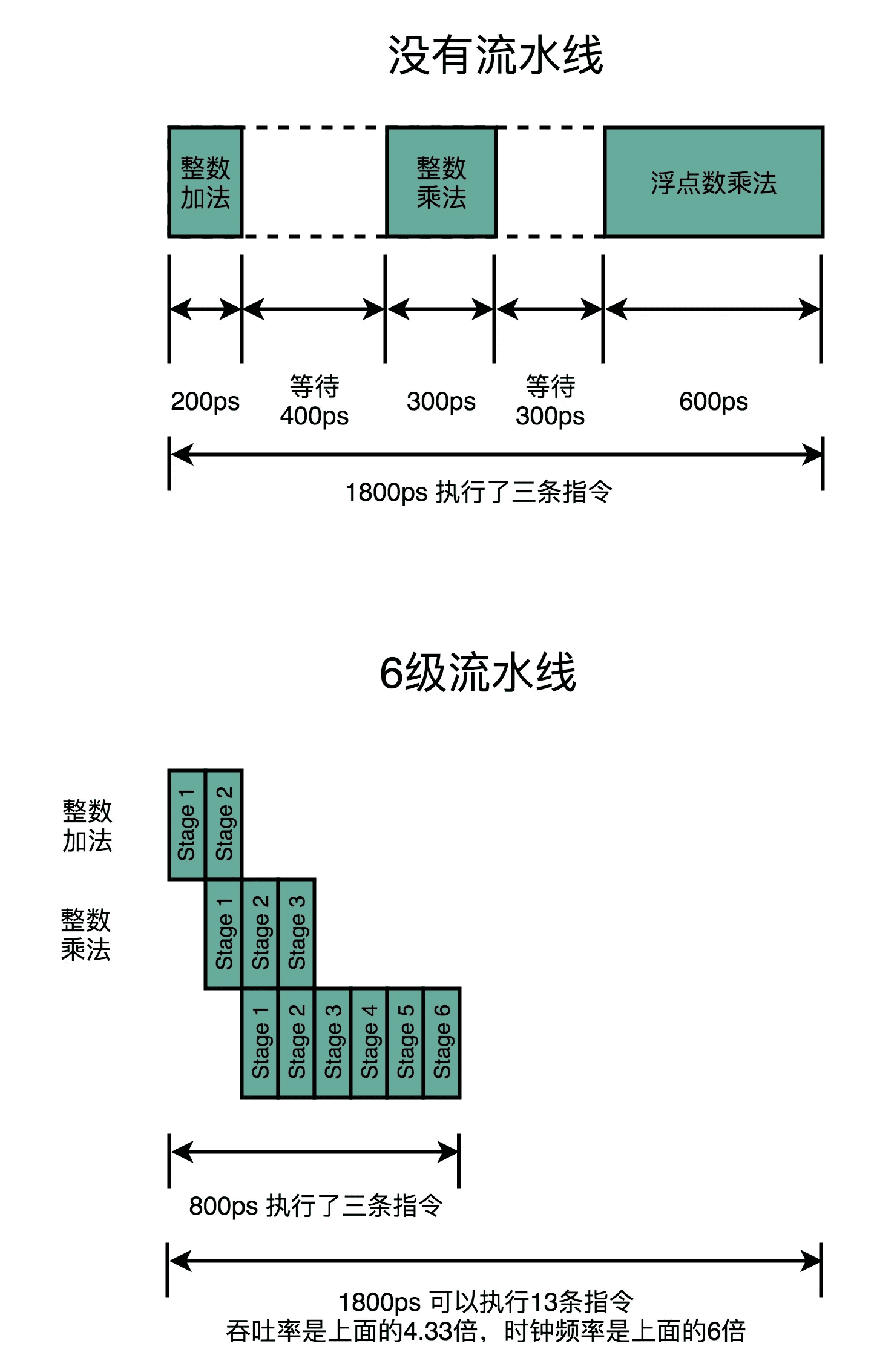
如果某一个操作步骤的时间太长,我们就可以考虑把这个步骤,拆分成更多的步骤,让所有步骤需要执行的时间尽量都差不多长。这样,也就可以解决我们在单指令周期处理器中遇到的,性能瓶颈来自于最复杂的指令的问题。像我们现代的 ARM 或者 Intel 的 CPU,流水线级数都已经到了 14 级。
虽然我们不能通过流水线,来减少单条指令执行的“延时”这个性能指标,但是,通过同时在执行多条指令的不同阶段,我们提升了 CPU 的“吞吐率”。在外部看来,我们的 CPU 好像是“一心多用”,在同一时间,同时执行 5 条不同指令的不同阶段。在 CPU 内部,其实它就像生产线一样,不同分工的组件不断处理上游传递下来的内容,而不需要等待单件商品生产完成之后,再启动下一件商品的生产过程。
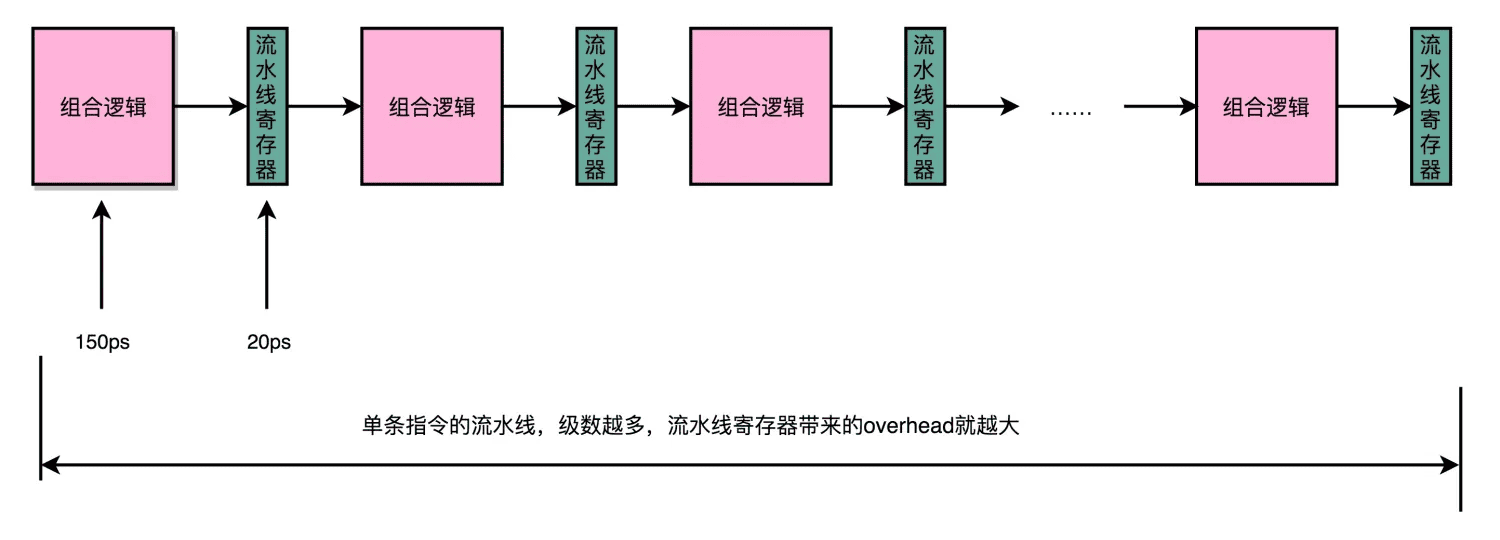
但是,如果我们不断加深流水线,这些操作占整个指令的执行时间的比例就会不断增加。最后,我们的性能瓶颈就会出现在这些 overhead 上。如果我们指令的执行有 3 纳秒,也就是 3000 皮秒。我们需要 20 级的流水线,那流水线寄存器的写入就需要花费 400 皮秒,占了超过 10%。如果我们需要 50 级流水线,就要多花费 1 纳秒在流水线寄存器上,占到 25%。这也就意味着,单纯地增加流水线级数,不仅不能提升性能,反而会有更多的 overhead 的开销。所以,设计合理的流水线级数也是现代 CPU 中非常重要的一点。
想要了解 CPU 的流水线设计,可以参看《深入理解计算机系统》的 4.4 章节,以及《计算机组成与设计 硬件 / 软件接口》的 4.5 章节。
流水线技术和其他技术一样,都讲究一个“折衷”(Trade-Off)。一个合理的流水线深度,会提升我们 CPU 执行计算机指令的吞吐率。我们一般用 IPC(Instruction Per Cycle)来衡量 CPU 执行指令的效率。
整个 CPU 领域竞争的焦点,不再是 Intel 和 AMD 之间的桌面 CPU 之战。在 ARM 架构通过智能手机的快速普及,后来居上,超越 Intel 之后,移动时代的 CPU 之战,变成了高通、华为麒麟和三星之间的“三国演义”。
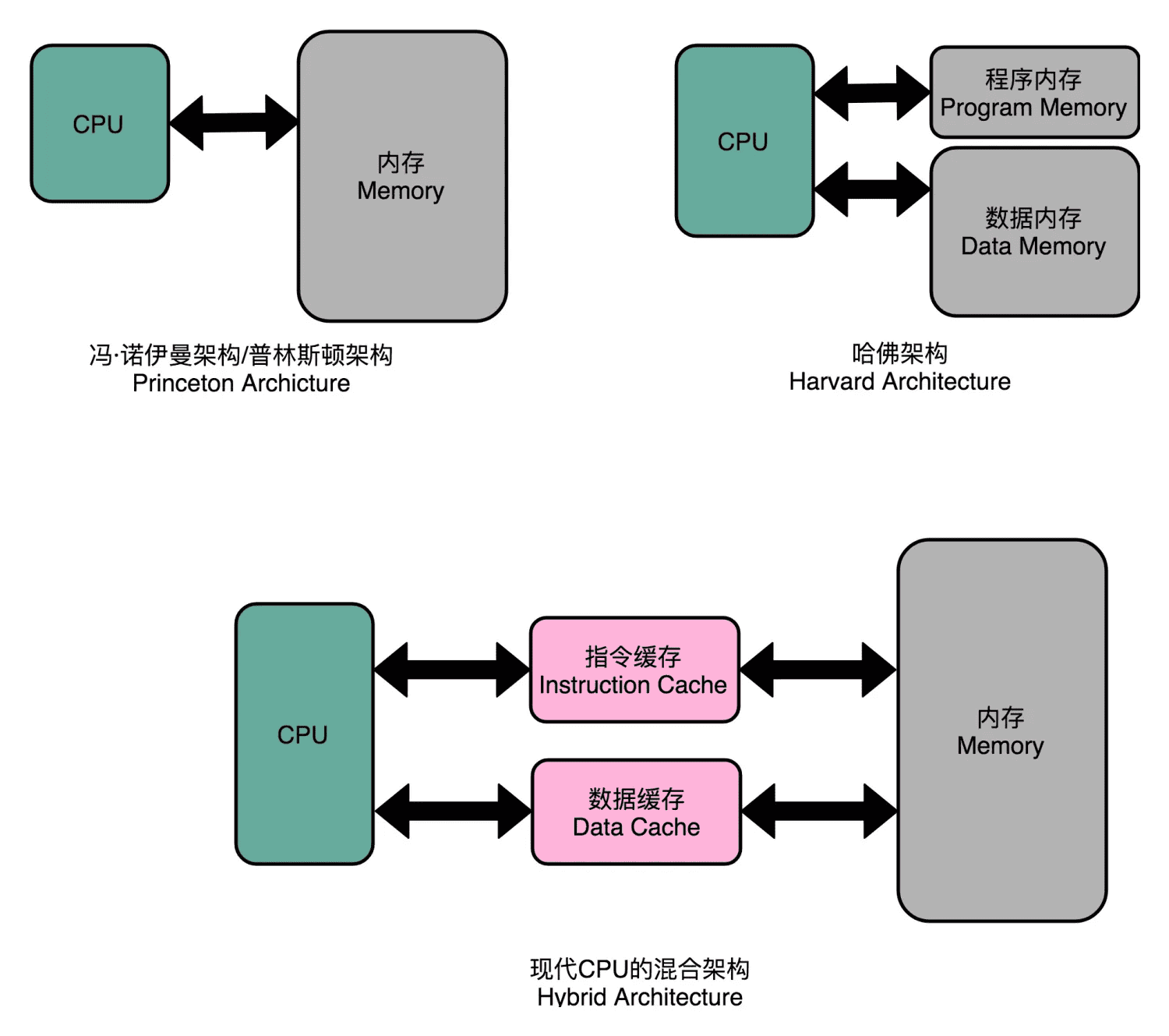
不过,我们今天使用的 CPU,仍然是冯·诺依曼体系结构的,并没有把内存拆成程序内存和数据内存这两部分。因为如果那样拆的话,对程序指令和数据需要的内存空间,我们就没有办法根据实际的应用去动态分配了。虽然解决了资源冲突的问题,但是也失去了灵活性。
乱序执行,这个解决流水线阻塞的技术方案。因为数据的依赖关系和指令先后执行的顺序问题,很多时候,流水线不得不“阻塞”在特定的指令上。即使后续别的指令,并不依赖正在执行的指令和阻塞的指令,也不能继续执行。
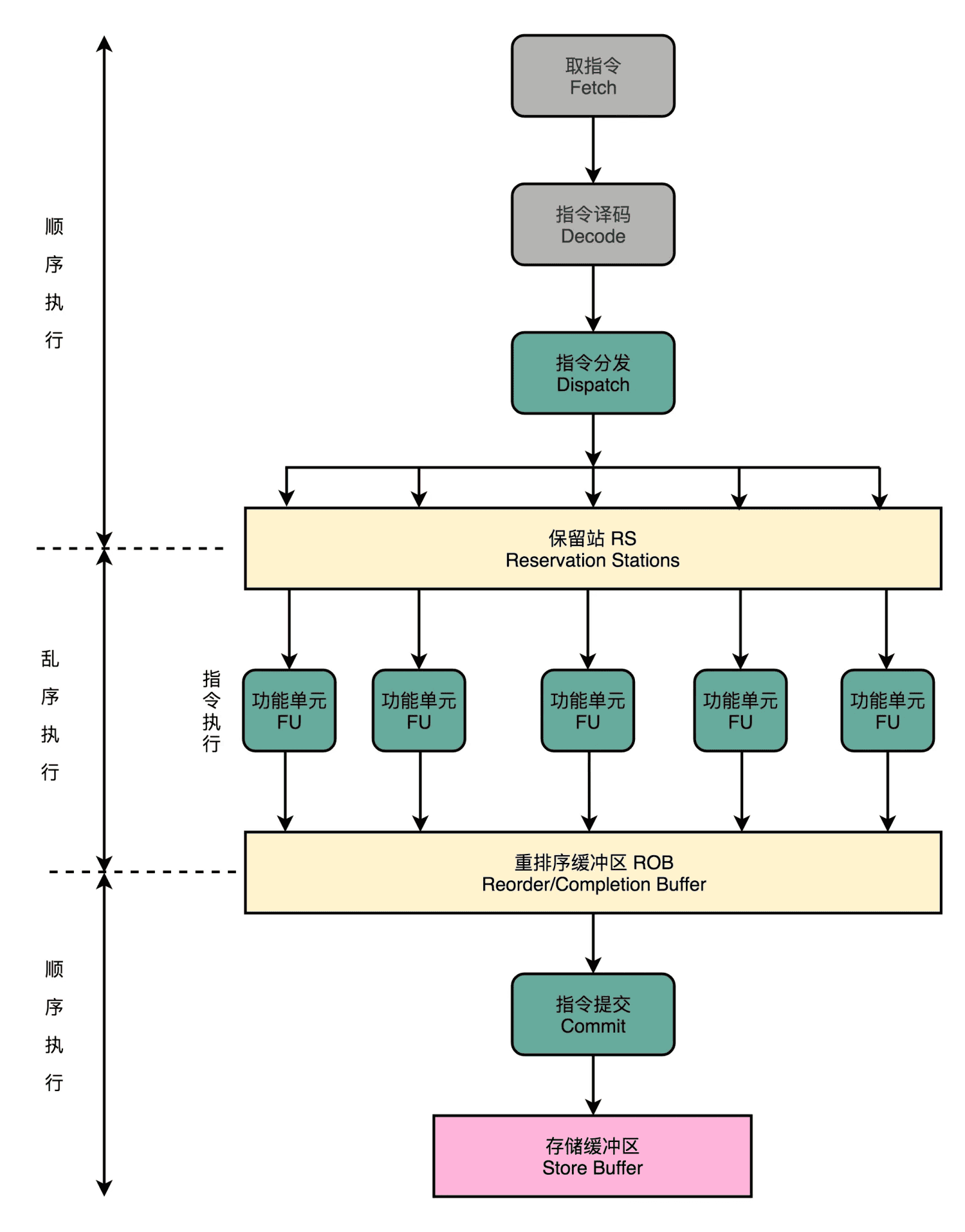
而乱序执行,则是在指令执行的阶段通过一个类似线程池的保留站,让系统自己去动态调度先执行哪些指令。这个动态调度巧妙地解决了流水线阻塞的问题。指令执行的先后顺序,不再和它们在程序中的顺序有关。我们只要保证不破坏数据依赖就好了。CPU 只要等到在指令结果的最终提交的阶段,再通过重排序的方式,确保指令“实际上”是顺序执行的。
整个乱序执行技术,就好像在指令的执行阶段提供一个“线程池”。指令不再是顺序执行的,而是根据池里所拥有的资源,以及各个任务是否可以进行执行,进行动态调度。在执行完成之后,又重新把结果在一个队列里面,按照指令的分发顺序重新排序。即使内部是“乱序”的,但是在外部看起来,仍然是井井有条地顺序执行。 乱序执行,极大地提高了 CPU 的运行效率。核心原因是,现代 CPU 的运行速度比访问主内存的速度要快很多。如果完全采用顺序执行的方式,很多时间都会浪费在前面指令等待获取内存数据的时间里。CPU 不得不加入 NOP 操作进行空转。而现代 CPU 的流水线级数也已经相对比较深了,到达了 14 级。这也意味着,同一个时钟周期内并行执行的指令数是很多的。
而乱序执行,以及我们后面要讲的高速缓存,弥补了 CPU 和内存之间的性能差异。同样,也充分利用了较深的流水行带来的并发性,使得我们可以充分利用 CPU 的性能。
在现代 Intel 的 CPU 的乱序执行的过程中,只有指令的执行阶段是乱序的,后面的内存访问和数据写回阶段都仍然是顺序的。这种保障内存数据访问顺序的模型,叫作强内存模型(Strong Memory Model)。
想要进一步了解控制冒险和分支预测技术,可以去读一读《计算机组成与设计:硬件 / 软件接口》的 4.8 章节。
如果想对各种分支预测技术有所了解,Wikipedia里面有更详细的内容和更多的分支预测算法。
超标量(Superscalar)技术能够让取指令以及指令译码也并行进行;在编译的过程,超长指令字(VLIW)技术可以搞定指令先后的依赖关系,使得一次可以取一个指令包。
不过,CPU 里的各种神奇的优化我们还远远没有说完。这一讲里,我就带你一起来看看,专栏里最后两个提升 CPU 性能的架构设计。它们分别是,你应该常常听说过的超线程(Hyper-Threading)技术,以及可能没有那么熟悉的单指令多数据流(SIMD)技术。
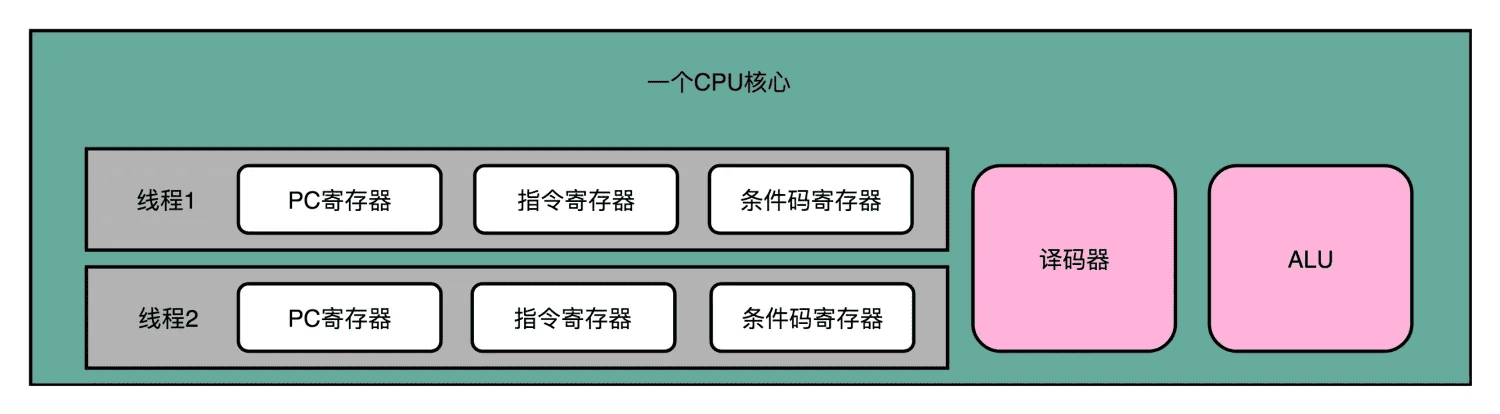
超线程的 CPU,其实是把一个物理层面 CPU 核心,“伪装”成两个逻辑层面的 CPU 核心。这个 CPU,会在硬件层面增加很多电路,使得我们可以在一个 CPU 核心内部,维护两个不同线程的指令的状态信息。
比如,在一个物理 CPU 核心内部,会有双份的 PC 寄存器、指令寄存器乃至条件码寄存器。这样,这个 CPU 核心就可以维护两条并行的指令的状态。在外面看起来,似乎有两个逻辑层面的 CPU 在同时运行。所以,超线程技术一般也被叫作同时多线程(Simultaneous Multi-Threading,简称 SMT)技术。
不过,在 CPU 的其他功能组件上,Intel 可不会提供双份。无论是指令译码器还是 ALU,一个 CPU 核心仍然只有一份。因为超线程并不是真的去同时运行两个指令,那就真的变成物理多核了。超线程的目的,是在一个线程 A 的指令,在流水线里停顿的时候,让另外一个线程去执行指令。因为这个时候,CPU 的译码器和 ALU 就空出来了,那么另外一个线程 B,就可以拿来干自己需要的事情。这个线程 B 可没有对于线程 A 里面指令的关联和依赖。
这样,CPU 通过很小的代价,就能实现“同时”运行多个线程的效果。通常我们只要在 CPU 核心的添加 10% 左右的逻辑功能,增加可以忽略不计的晶体管数量,就能做到这一点。
不过,你也看到了,我们并没有增加真的功能单元。所以超线程只在特定的应用场景下效果比较好。一般是在那些各个线程“等待”时间比较长的应用场景下。比如,我们需要应对很多请求的数据库应用,就很适合使用超线程。各个指令都要等待访问内存数据,但是并不需要做太多计算。
计算机里的“异常”处理流程。这里的异常可以分成中断、陷阱、故障、中止这样四种情况。这四种异常,分别对应着 I/O 设备的输入、程序主动触发的状态切换、异常情况下的程序出错以及出错之后无可挽回的退出程序。
当 CPU 遭遇了异常的时候,计算机就需要有相应的应对措施。CPU 会通过“查表法”来解决这个问题。在硬件层面和操作系统层面,各自定义了所有 CPU 可能会遇到的异常代码,并且通过这个异常代码,在异常表里面查询相应的异常处理程序。
在捕捉异常的时候,我们的硬件 CPU 在进行相应的操作,而在处理异常层面,则是由作为软件的异常处理程序进行相应的操作。
关于异常和中断,《深入理解计算机系统》的第 8 章“异常控制流”部分,有非常深入和充分的讲解,推荐你认真阅读一下。
CPU 的指令集里的机器码是固定长度还是可变长度,也就是复杂指令集(Complex Instruction Set Computing,简称 CISC)和精简指令集(Reduced Instruction Set Computing,简称 RISC)这两种风格的指令集一个最重要的差别。那今天我们就来看复杂指令集和精简指令集之间的对比、差异以及历史纠葛。
在计算机历史的早期,其实没有什么 CISC 和 RISC 之分。或者说,所有的 CPU 其实都是 CISC。
不过,历史的车轮滚滚向前,计算机的性能越来越好,存储的空间也越来越大了。到了 70 年代末,RISC 开始登上了历史的舞台。当时,UC Berkeley的大卫·帕特森(David Patterson)教授发现,实际在 CPU 运行的程序里,80% 的时间都是在使用 20% 的简单指令。于是,他就提出了 RISC 的理念。自此之后,RISC 类型的 CPU 开始快速蓬勃发展。
我经常推荐的课后阅读材料,有不少是来自《计算机组成与设计:硬件 / 软件接口》和《计算机体系结构:量化研究方法》这两本教科书。大卫·帕特森教授正是这两本书的作者。此外,他还在 2017 年获得了图灵奖。

RISC 架构的 CPU 究竟是什么样的呢?为什么它能在这么短的时间内受到如此大的追捧?
不过,ARM 并不是开源的。所以,在 ARM 架构逐渐垄断移动端芯片市场的时候,“开源硬件”也慢慢发展起来了。一方面,MIPS 在 2019 年宣布开源;另一方面,从 UC Berkeley 发起的RISC-V项目也越来越受到大家的关注。而 RISC 概念的发明人,图灵奖的得主大卫·帕特森教授从伯克利退休之后,成了 RISC-V 国际开源实验室的负责人,开始推动 RISC-V 这个“CPU 届的 Linux”的开发。
可以想见,未来的开源 CPU,也多半会像 Linux 一样,逐渐成为一个业界的主流选择。如果想要“打造一个属于自己 CPU”,不可不关注这个项目。
ARM 和 x86 之间的功耗差异,并不是来自于 CISC 和 RISC 的指令集差异,而是因为两类芯片的设计,本就是针对不同的性能目标而进行的,和指令集是 CISC 还是 RISC 并没有什么关系。
一个基于多边形建模的三维图形的渲染过程。这个渲染过程需要经过顶点处理、图元处理、栅格化、片段处理以及像素操作这 5 个步骤。这 5 个步骤把存储在内存里面的多边形数据变成了渲染在屏幕上的画面。因为里面的很多步骤,都需要渲染整个画面里面的每一个像素,所以其实计算量是很大的。我们的 CPU 这个时候,就有点跑不动了。
于是,像 3dfx 和 NVidia 这样的厂商就推出了 3D 加速卡,用硬件来完成图元处理开始的渲染流程。这些加速卡和现代的显卡还不太一样,它们是用固定的处理流程来完成整个 3D 图形渲染的过程。不过,因为不用像 CPU 那样考虑计算和处理能力的通用性。我们就可以用比起 CPU 芯片更低的成本,更好地完成 3D 图形的渲染工作。而 3D 游戏的时代也是从这个时候开始的。
在上世纪 90 年代的时候,屏幕的分辨率还没有现在那么高。一般的 CRT 显示器也就是 640×480 的分辨率。这意味着屏幕上有 30 万个像素需要渲染。为了让我们的眼睛看到画面不晕眩,我们希望画面能有 60 帧。于是,每秒我们就要重新渲染 60 次这个画面。也就是说,每秒我们需要完成 1800 万次单个像素的渲染。从栅格化开始,每个像素有 3 个流水线步骤,即使每次步骤只有 1 个指令,那我们也需要 5400 万条指令,也就是 54M 条指令。
90 年代的 CPU 的性能是多少呢?93 年出货的第一代 Pentium 处理器,主频是 60MHz,后续逐步推出了 66MHz、75MHz、100MHz 的处理器。以这个性能来看,用 CPU 来渲染 3D 图形,基本上就要把 CPU 的性能用完了。因为实际的每一个渲染步骤可能不止一个指令,我们的 CPU 可能根本就跑不动这样的三维图形渲染。
也就是在这个时候,Voodoo FX 这样的图形加速卡登上了历史舞台。既然图形渲染的流程是固定的,那我们直接用硬件来处理这部分过程,不用 CPU 来计算是不是就好了?很显然,这样的硬件会比制造有同样计算性能的 CPU 要便宜得多。因为整个计算流程是完全固定的,不需要流水线停顿、乱序执行等等的各类导致 CPU 计算变得复杂的问题。我们也不需要有什么可编程能力,只要让硬件按照写好的逻辑进行运算就好了。
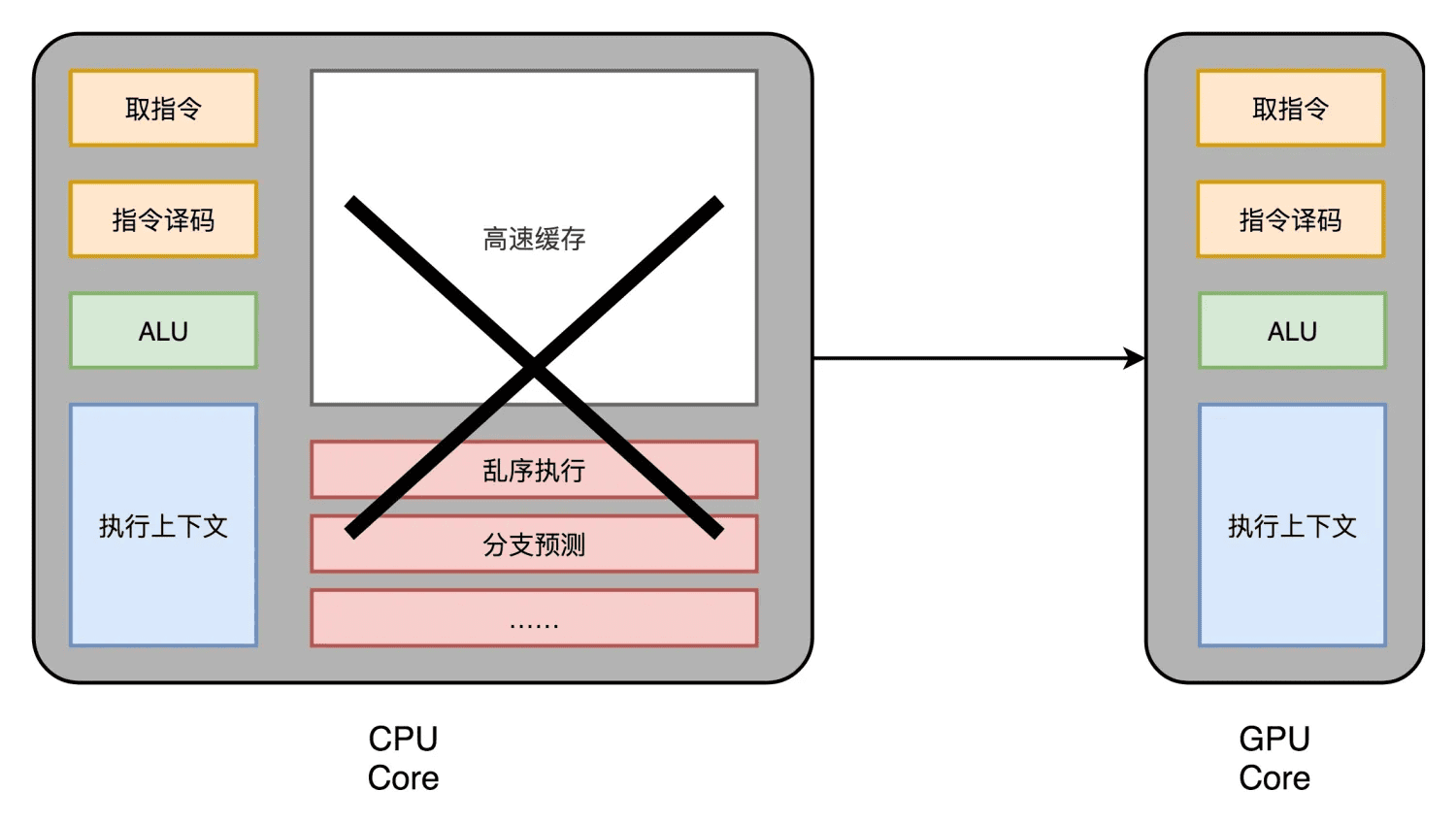
我们先来回顾一下,之前花了很多讲仔细讲解的现代 CPU。现代 CPU 里的晶体管变得越来越多,越来越复杂,其实已经不是用来实现“计算”这个核心功能,而是拿来实现处理乱序执行、进行分支预测,以及我们之后要在存储器讲的高速缓存部分。
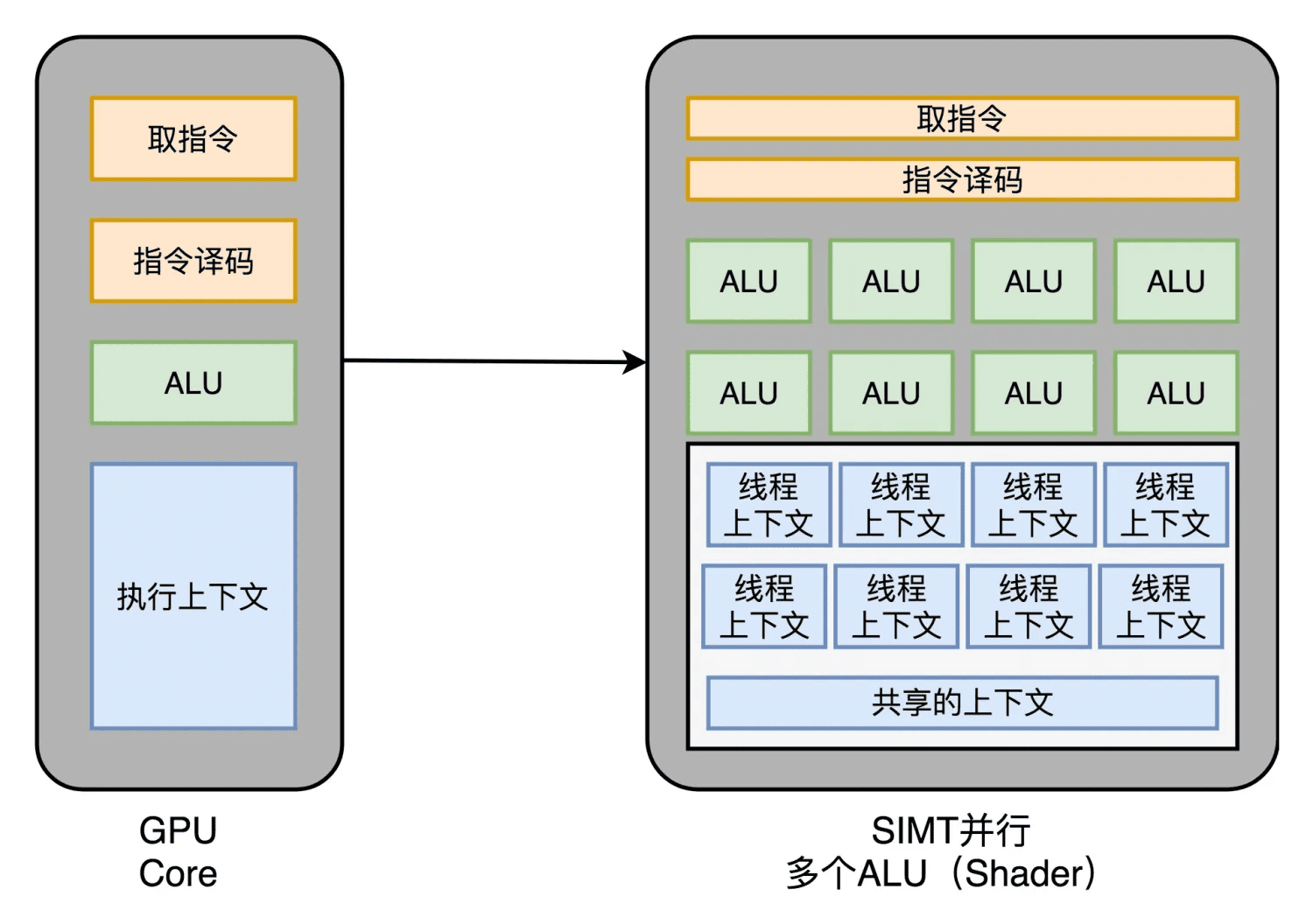
而在 GPU 里,这些电路就显得有点多余了,GPU 的整个处理过程是一个流式处理(Stream Processing)的过程。因为没有那么多分支条件,或者复杂的依赖关系,我们可以把 GPU 里这些对应的电路都可以去掉,做一次小小的瘦身,只留下取指令、指令译码、ALU 以及执行这些计算需要的寄存器和缓存就好了。一般来说,我们会把这些电路抽象成三个部分,就是下面图里的取指令和指令译码、ALU 和执行上下文。
这样一来,我们的 GPU 电路就比 CPU 简单很多了。于是,我们就可以在一个 GPU 里面,塞很多个这样并行的 GPU 电路来实现计算,就好像 CPU 里面的多核 CPU 一样。和 CPU 不同的是,我们不需要单独去实现什么多线程的计算。因为 GPU 的运算是天然并行的。
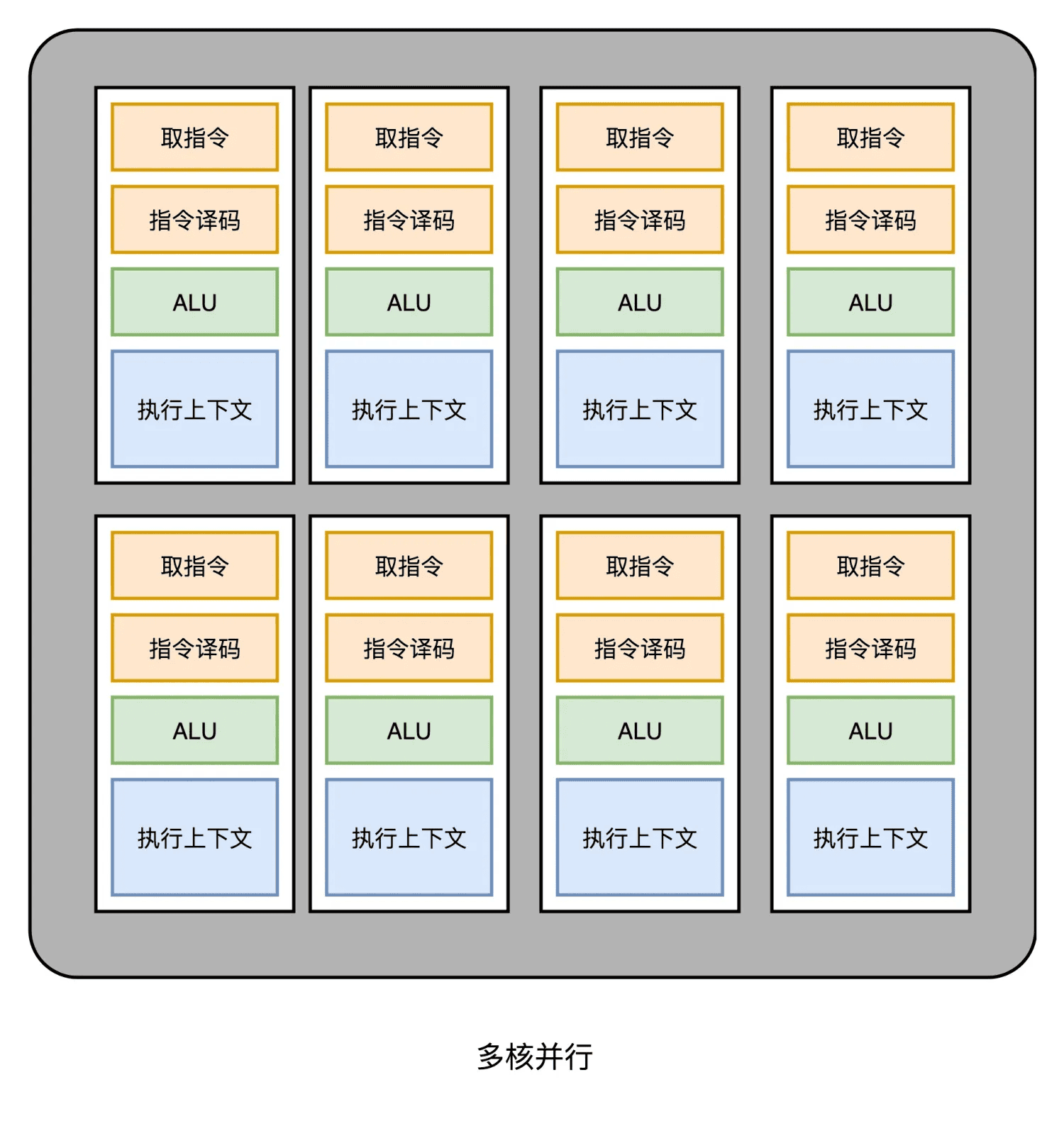
无论是对多边形里的顶点进行处理,还是屏幕里面的每一个像素进行处理,每个点的计算都是独立的。所以,简单地添加多核的 GPU,就能做到并行加速。不过光这样加速还是不够,工程师们觉得,性能还有进一步被压榨的空间。
我们的 GPU 设计就可以进一步进化,也就是在取指令和指令译码的阶段,取出的指令可以给到后面多个不同的 ALU 并行进行运算。这样,我们的一个 GPU 的核里,就可以放下更多的 ALU,同时进行更多的并行运算了。
在通过芯片瘦身、SIMT 以及更多的执行上下文,我们就有了一个更擅长并行进行暴力运算的 GPU。这样的芯片,也正适合我们今天的深度学习的使用场景。
一方面,GPU 是一个可以进行“通用计算”的框架,我们可以通过编程,在 GPU 上实现不同的算法。另一方面,现在的深度学习计算,都是超大的向量和矩阵,海量的训练样本的计算。整个计算过程中,没有复杂的逻辑和分支,非常适合 GPU 这样并行、计算能力强的架构。
我们去看 NVidia 2080 显卡的技术规格,就可以算出,它到底有多大的计算能力。
2080 一共有 46 个 SM(Streaming Multiprocessor,流式处理器),这个 SM 相当于 GPU 里面的 GPU Core,所以你可以认为这是一个 46 核的 GPU,有 46 个取指令指令译码的渲染管线。每个 SM 里面有 64 个 Cuda Core。你可以认为,这里的 Cuda Core 就是我们上面说的 ALU 的数量或者 Pixel Shader 的数量,46x64 呢一共就有 2944 个 Shader。然后,还有 184 个 TMU,TMU 就是 Texture Mapping Unit,也就是用来做纹理映射的计算单元,它也可以认为是另一种类型的 Shader。
使用 GPU 进行深度学习,往往能够把深度学习算法的训练时间,缩短一个,乃至两个数量级。而 GPU 现在也越来越多地用在各种科学计算和机器学习上,而不仅仅是用在图形渲染上了。